欢迎投稿交流,投稿请联系:Sykeji02(微信号)针对柔性铰链式压电粘滑执行器在结构紧凑性、驱动足复合变形和输出性能之间的设计问题,本文提出了一种由两个 L 型柔性铰链串联构成的压电粘滑执行器。压电叠堆嵌入串联柔性铰链机构中,伸长时驱动足同时产生垂直和水平方向变形:垂直分量用于压紧滑块,水平分量用于通过静摩擦驱动滑块前进。作者通过有限元静力分析、应力分析、动力学建模和样机实验验证了该结构。结果表明,在 100 V、480 Hz 条件下执行器最大速度达到 4.39 mm/s;在 3 N 预压力下最大输出力达到 1.2 N。核心指标
机构形式 | 双 L 型柔性铰链串联 | 驱动源 | PZT stack |
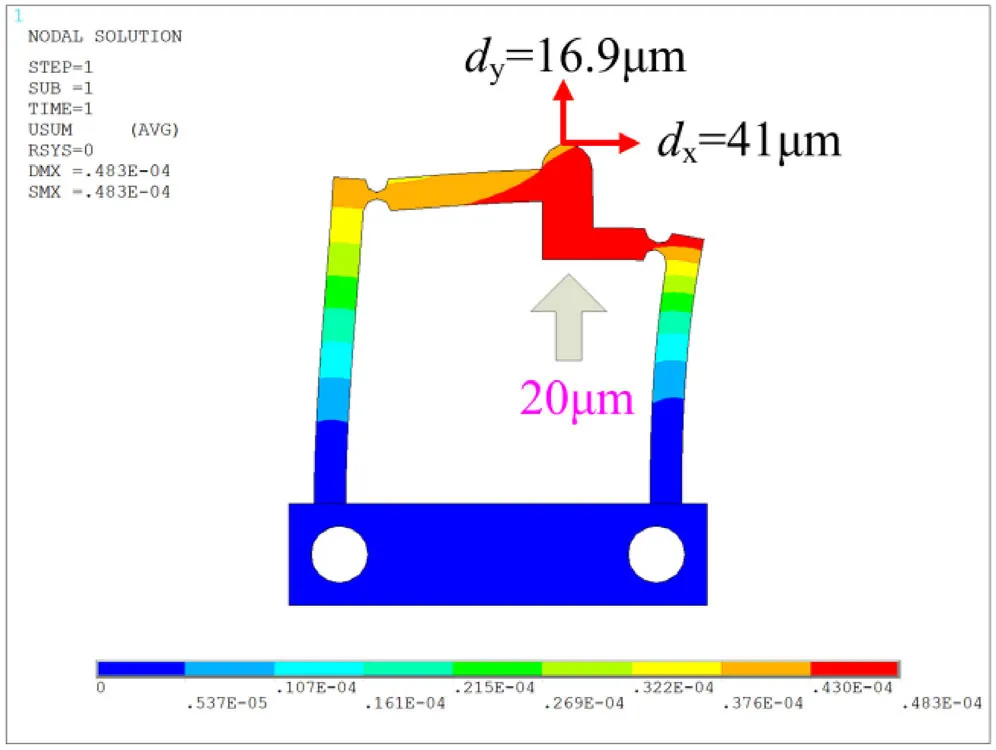
仿真位移 | dx = 41 μm | 垂直变形 | dy = 16.9 μm |
最大应力 | 171 MPa | 材料 | AL7075 |
最大速度 | 4.39 mm/s | 工作条件 | 100 V / 480 Hz |
最大输出力 | 1.2 N | 预压力 | 3 N |
加工方式 | 线切割样机 | 工作原理 | 粘滑驱动 |
一句话导读
这篇工作用两个串联 L 型柔性铰链,把压电叠堆的伸缩转化为驱动足的水平-垂直复合变形,从而在较紧凑结构中实现粘滑直线驱动。
作者团队与研究定位
该论文由吉林农业科技学院机械与土木工程学院 Junxiang Jiang 和东北电力大学机械工程学院 Liang Wang 合作完成。论文聚焦于压电粘滑执行器中“如何用更紧凑的柔性铰链结构产生有效驱动足复合变形”这一问题,核心思路是用两个 L 型柔性铰链串联形成特殊传动构型。
论文信息
Jiang J, Wang L. Development of a Piezoelectric Stick-Slip Actuator With Two L-Shaped Flexure Hinges in Series Connection[J]. Energy Technology, 2026, 14:e70526.
DOI:https://doi.org/10.1002/ente.70526
压电粘滑执行器具有结构简单、激励信号简单、定位精度高和压电元件数量少等优点,适合小型精密驱动场景。但要让滑块稳定前进,驱动足必须同时具备压紧和推动能力,这通常依赖特殊柔性铰链产生水平与垂直复合变形。
已有方案常通过三角形驱动足、杠杆式结构或复杂曲线柔性铰链来形成复合变形,但这些设计往往增加加工难度和结构尺寸。本文希望用更简单紧凑的串联 L 型铰链结构实现类似功能。
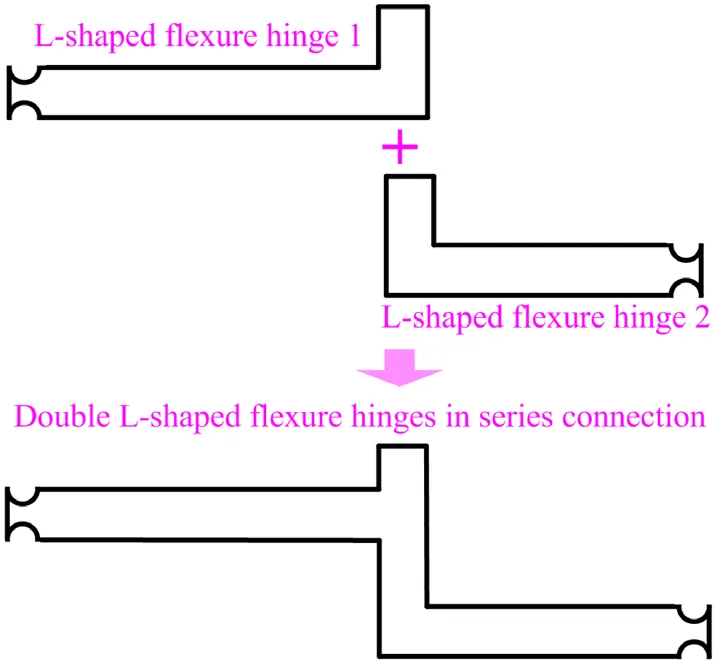
图1 双 L 型柔性铰链串联结构。两个 L 型铰链端部连接后形成特殊柔顺传动路径。
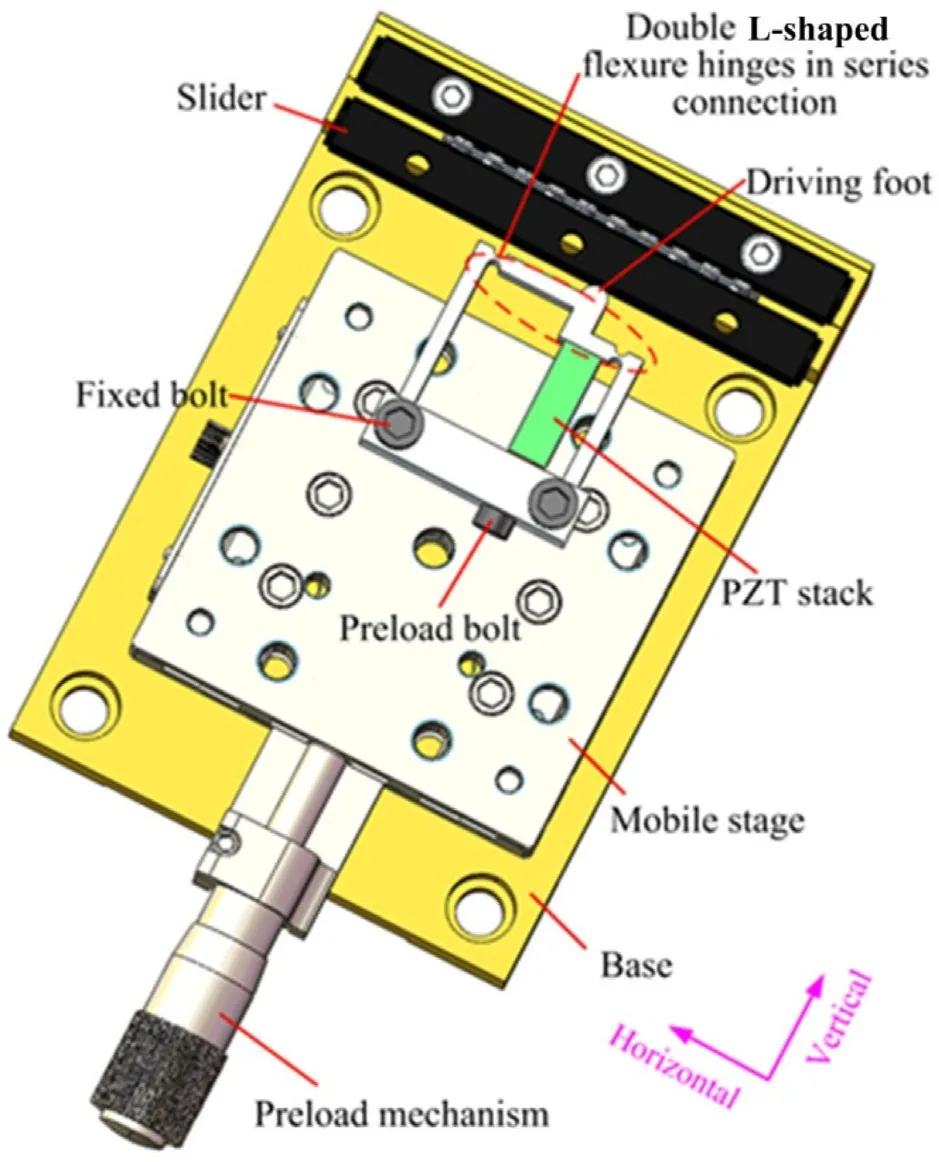
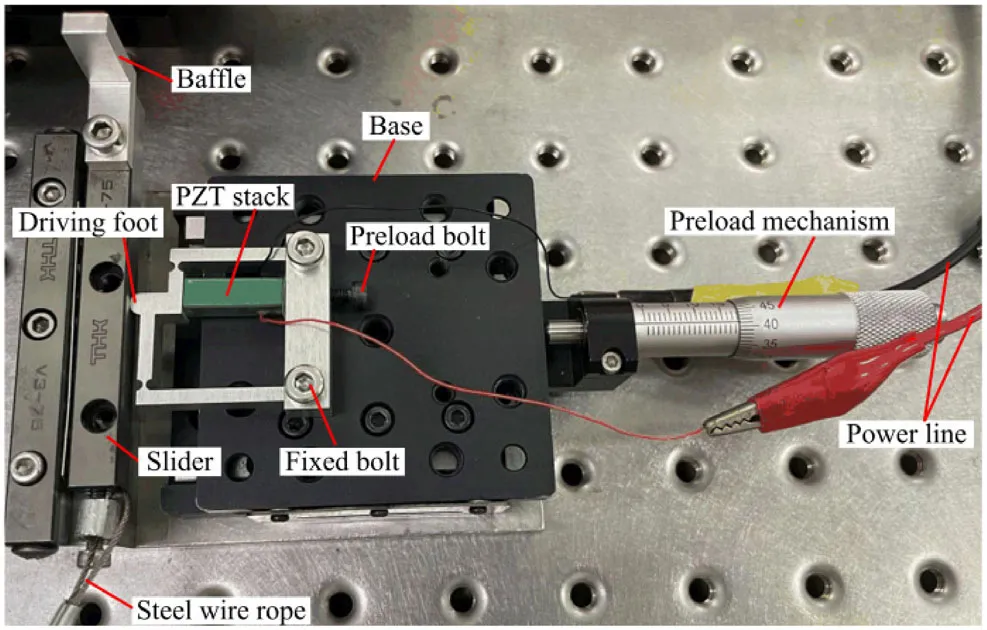
图2 压电粘滑执行器总体结构。PZT 叠堆、驱动足、滑块、预紧机构和基座共同构成样机。
结构设计:两个 L 型铰链如何形成驱动足复合变形?执行器的核心是两个 L 型柔性铰链串联连接,压电叠堆安装在柔性机构内部。当 PZT 叠堆伸长时,柔性机构将轴向输入转化为驱动足的水平和垂直复合位移。
其中,垂直位移用于提高驱动足与滑块之间的接触压力,水平位移用于通过静摩擦拖动滑块。这样一来,单个压电叠堆即可同时承担压紧和驱动功能,有利于减少结构复杂度。
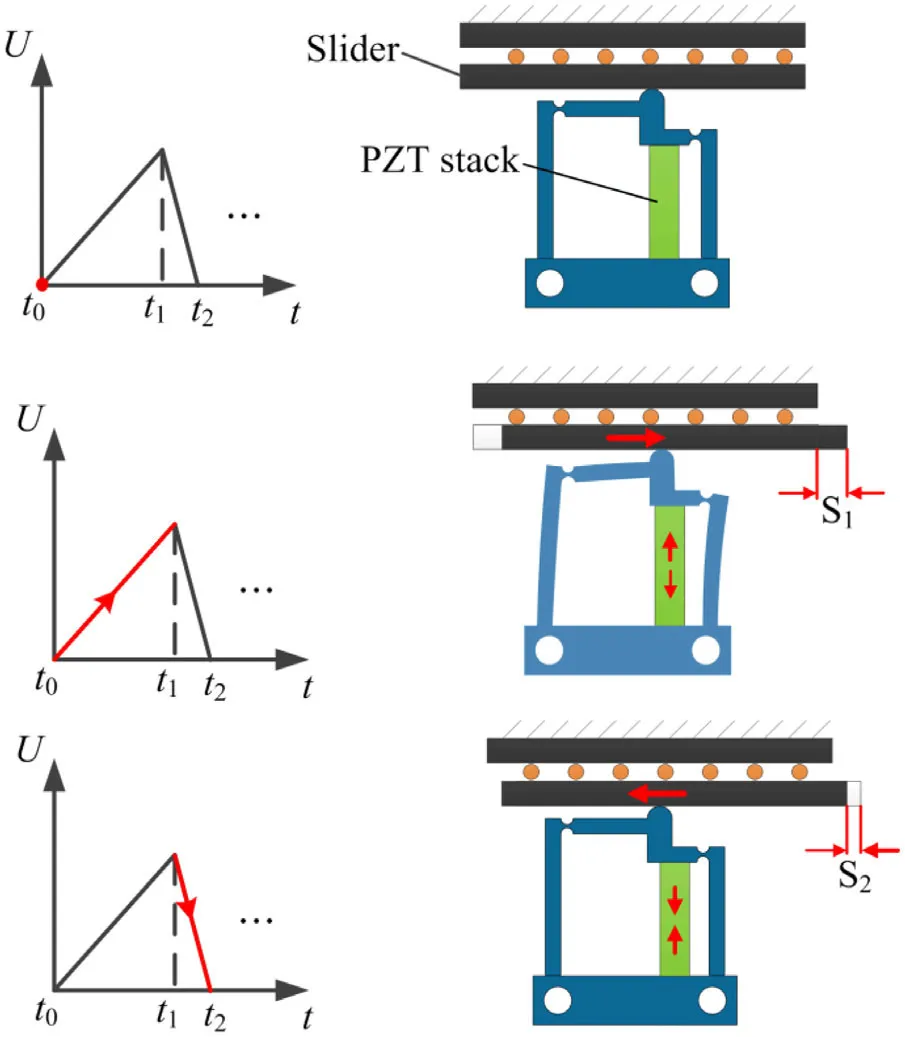
图3 粘滑工作原理。压电叠堆伸长时驱动滑块前进,回缩时发生滑移并产生较小回退。
作者选用 AL7075 作为柔性铰链材料,并以 20 μm 作为 PZT 叠堆输入位移进行有限元静力分析。结果显示,驱动足水平变形约为 41 μm,垂直变形约为 16.9 μm,说明该串联铰链结构确实能放大并转换输入位移。
应力分析表明,在相同输入条件下最大工作应力约为 171 MPa,明显低于材料 500 MPa 屈服强度。考虑实际建议驱动电压低于 150 V,真实工作应力还会更低,因此结构强度具备一定安全裕度。
图4 有限元变形分析。20 μm 输入位移下,驱动足产生约 41 μm 水平变形和 16.9 μm 垂直变形。
论文建立了包含 PZT 叠堆、柔性铰链和滑块的动力学模型,并用 LuGre 摩擦模型描述驱动足与滑块之间的摩擦状态。Simulink 仿真显示,输出位移呈锯齿形增长,并伴随一定回退,符合粘滑工作机理。
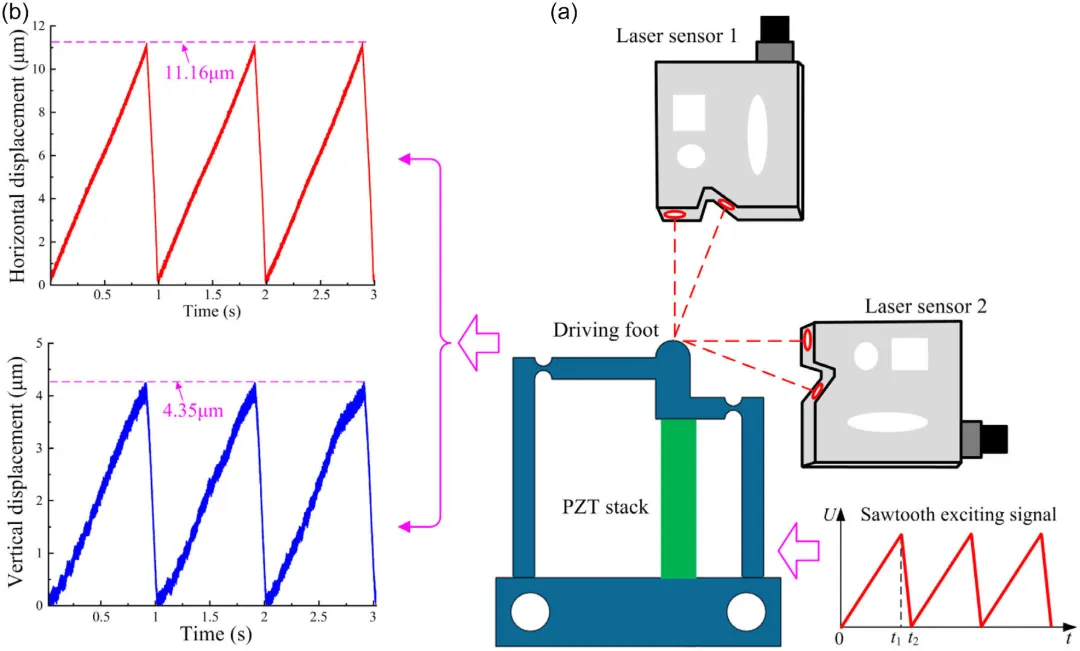
样机采用线切割加工,实验系统中使用两个激光位移传感器测量驱动足水平和垂直位移,并通过预紧机构调节接触状态。测量结果显示,驱动足的两方向位移均随锯齿激励变化,验证了结构设计思路。
图5 执行器样机。实验中通过预紧机构和钢丝绳-滑轮加载系统测试运动与负载能力。
图6 驱动足位移测试结果。水平与垂直分量均呈锯齿响应,验证复合变形输出。
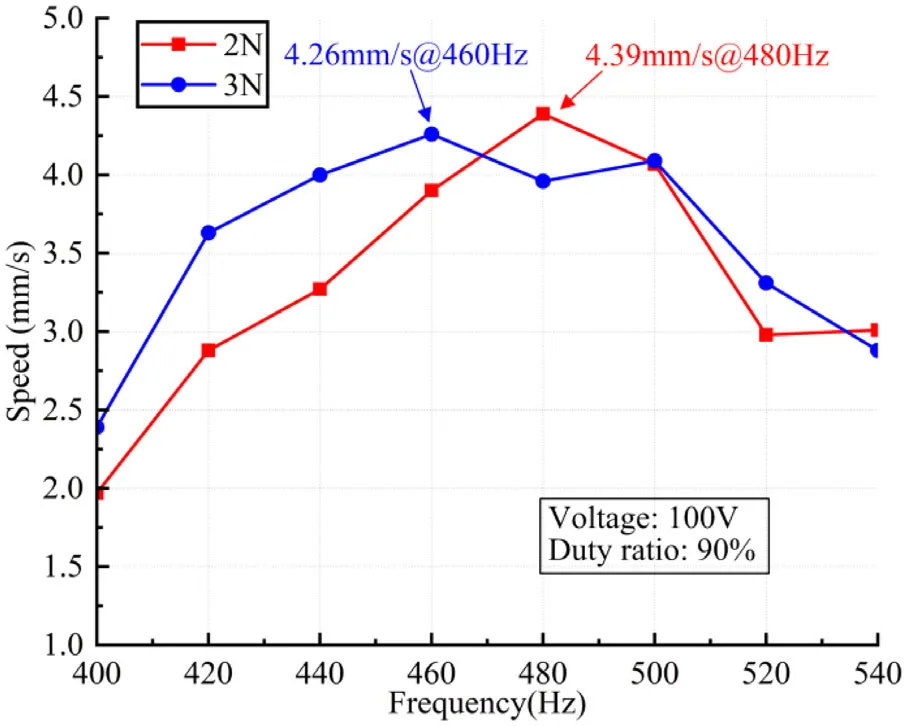
速度实验中,作者在 100 V 电压和 90% 占空比条件下测试不同预压力。2 N 预压力时,执行器在 480 Hz 下达到最大速度 4.39 mm/s;3 N 预压力时,速度峰值出现在 460 Hz,约为 4.26 mm/s。
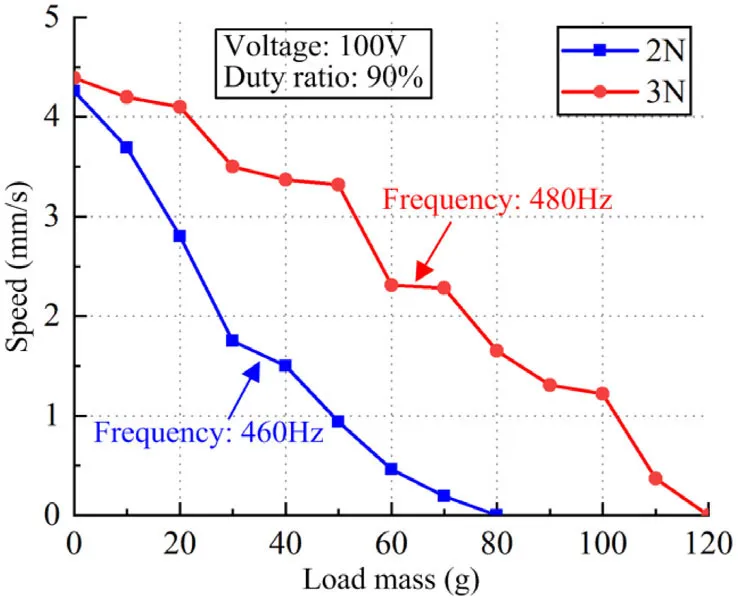
负载实验表明,随着负载质量增加,速度逐渐下降。2 N 预压力下最大可拖动负载约 80 g,而 3 N 预压力下最大负载达到 120 g,对应最大输出力约 1.2 N。这说明较高预压力可以提高输出力,但也会影响最佳速度频率点。
图7 速度-频率实验结果。在 100 V、90% 占空比下,2 N 预压力时 480 Hz 达到 4.39 mm/s。
图8 速度-负载质量测试结果。负载增大时速度下降,3 N 预压力下最大输出力达到 1.2 N。
这篇工作的价值在于用较简单的双 L 型柔性铰链串联结构实现了驱动足复合变形,不需要多个压电元件或复杂驱动足构型,就能完成压紧和推进两个动作。
从结果看,41 μm 水平变形、16.9 μm 垂直变形、4.39 mm/s 最大速度和 1.2 N 输出力,说明该结构在紧凑粘滑执行器方向具有一定实用潜力。后续如果进一步优化回退抑制和高频稳定性,性能仍有提升空间。
原文信息
原文题目:Development of a Piezoelectric Stick-Slip Actuator With Two L-Shaped Flexure Hinges in Series Connection
期刊:Energy Technology, 2026, 14:e70526。
DOI:https://doi.org/10.1002/ente.70526