为什么农业视觉越强,末端执行器越重要?
- 2026-05-18 09:26:08

图片由AI创作
本文清研智慧农业原创整理
清研智慧农业源于清华装备院智能系统与大数据分析研究中心
“专注农业自动化非标定制研发”

很多人以为,农业机器人只要“看得准”,
采摘问题就能解决了一大半了。但真实情况恰恰相反:视觉越强,越会把问题推到最后几厘米。
也就是说当机器人已经能识别果子、定位果柄、判断成熟度,真正决定它能不能最终成功干活的,是末端执行器能不能把果子低损伤、稳定地摘下来。
01
视觉解决的是“找到目标”
不是“完成采摘”
农业视觉这些年发展很快。
相机、深度感知、目标检测、实例分割、采摘点识别、视觉伺服,这些技术让机器人越来越擅长回答一个问题:目标在哪里。
关于相关视觉感知的文献综述也明确提到,相关研究重点正集中在相机类型、目标检测、采摘点识别定位、主动视觉和视觉伺服等关键技术上。
但采摘并不是识别完,就成功的事。
视觉识别指引机器人到目标附近,而真正发生风险的是后面的动作:机械臂伸进去,末端执行器接触果实,夹住、吸住、剪断、扭下、转运、放进筐里。
这时,问题从“看不看得见”变成了“碰不碰得好”。
果子会被夹伤;果柄可能切不断;果实可能滑脱;枝叶可能挡住末端;旁边果实可能被误碰;放置时也可能产生二次损伤。
所以,视觉越强,反而要求末端执行器越强,
此时末端执行器反倒被推到了更关键的位置。
因为机器人已经看见了,
下一步就必须证明:它能摘。
图片由AI生成

02
视觉越准
越容易暴露“最后一厘米”的问题
过去很多采摘机器人做不成,
问题经常卡在识别阶段。
果子被叶子挡住,看不见;光照变了,识别错;果柄太细,定位不准;成熟果和未成熟果分不开。
那个阶段,大家自然会把注意力放在视觉算法上。
但当视觉能力提升以后,失败率依然存在。
机器人能够框出果子,不代表末端一定进得去;能够定位果柄,不代表剪刀一定对得准;能够规划路径,不代表接触后不会滑;能够识别成熟果,不代表采下来就是合格商品果。
一项田间评估显示,研究团队开发的草莓采摘机器人在农场环境下采摘周期为7.49秒,采摘成功率为53.57%;论文亮点还特别提到,夹爪需要对视觉模块带来的定位误差具备鲁棒性。
来自sciencedirect《Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper》
这句话很关键。
它说明真实采摘里,视觉误差不是完全消失的。
即便视觉很强,也仍然会有毫米级定位误差、姿态偏差、遮挡误差和深度误差。末端执行器必须能吸收这些误差,否则机器人看到目标以后,仍然摘不稳。
03
末端执行器不是简单的“夹爪”
而是采摘动作的执行系统
很多人只要说末端执行器,就会表述那就是一个夹爪的选择。窄了!
在采摘机器人里,末端执行器不是简单的“夹爪选择”,而是直接和作物接触的执行系统。
它包括接触材料、夹持结构、吸附机构、剪切机构、扭转机构、力控反馈、触觉感知、柔顺结构,以及失败恢复策略。
2025年一篇关于果蔬采摘机器人末端执行器的综述指出,末端执行器是直接与目标作物交互的关键部件,其结构柔性和适应性会显著影响采摘机器人的整体作业表现;由于果蔬形态不规则、尺寸变化大,研究中已经设计出多种末端执行器来减少损伤、提高作业效率。
这说明,末端执行器不是视觉之后的附属零件。
它决定机器人能不能把“视觉判断”变成“有效采摘”。
视觉告诉机器人:这是一个成熟果。末端执行器要完成的是:从这个角度进去,用这个力度接触,在不伤果、不伤枝、不碰邻果的情况下,把它分离出来,并稳定送到下一环节。
这才是真正的采摘。
来自南京农业大学(工学院,江苏省智能农业装备重点实验室)、江门职业技术学院(智能制造与装备学院)江苏大学(农业工程学院)等团队在MDPI发布的《An Electric Gripper for Picking Brown Mushrooms with Flexible Force and In Situ Measurement》

04
农业视觉越强
末端执行器面对的目标反而更复杂
视觉能力提升以后,机器人不再只挑最容易摘的果子。它会开始尝试处理更多复杂目标:半遮挡的果子、成串的果子、大小不一的果子、成熟度差异明显的果子、靠近枝叶和邻果的果子。
这反而对末端执行器提出更高要求。
因为视觉系统可以告诉你:这里有一颗果子。但末端执行器要回答:我从哪里进去?怎么接触?夹哪里?剪哪里?分离时遇到阻力怎么办?如果滑了,能不能重新抓?如果旁边有果,怎么避免误伤?
一项于2025年发布关于露天草莓采摘遮挡处理的研究提到,尽管从检测到采摘的过程已经取得很多进展,但这些技术仍未达到商业可行;其中一个限制因素,是开放田间环境中冠层遮挡带来的采摘性能问题。研究还提到,切割式末端执行器被专门设计为针对果柄,以尽量降低采摘过程中的擦伤风险。
这说明,视觉和末端执行器不是替代关系,而是递进关系。
视觉越能发现复杂目标,末端越要具备处理复杂接触的能力。
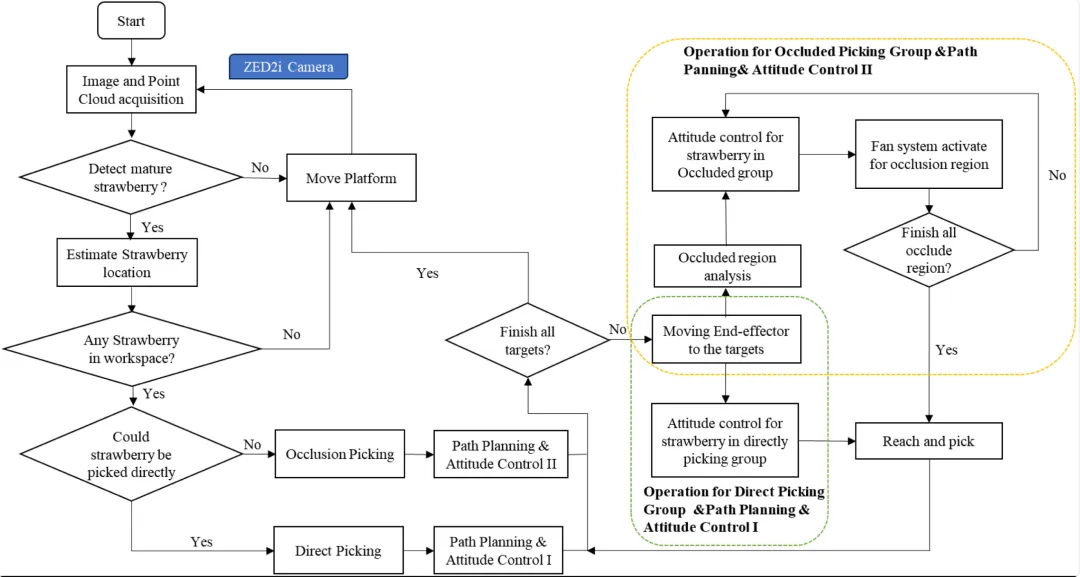
整体机器人收割流程图;来自华盛顿州立大学、康奈尔大学、华南农业大学工程学院、广东省农业人工智能重点实验室等团队于sciencedirect联合发布的文献《Improving picking efficiency under occlusion: Design, development, and field evaluation of an innovative robotic strawberry harvester》
05
真正决定商品果率的
是接触方式
对农业企业来说,采摘机器人不是把果子摘下来就算成功。
真正的成功,是摘下来以后仍然是合格的商品果。
这一点在草莓、蓝莓、番茄、蘑菇、葡萄等高价值鲜食品类里尤其明显。很多损伤不是当场破掉,而是暗伤、压痕、擦伤、果柄处理不当、放置落差过大,到了分选、运输、货架期才表现出来。
这就是末端执行器的重要性。
它决定机器人是硬夹,还是柔性接触。是抓果肉,还是抓果柄;是剪切,还是扭转;是一次硬拉,还是接触后微调;是把果子丢进筐里,还是低落差放置。
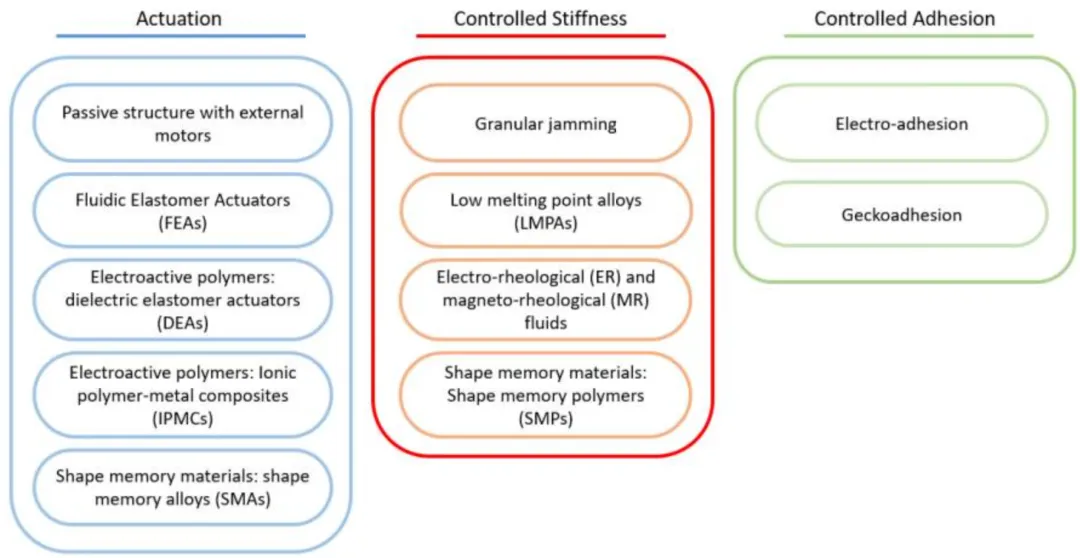
软体夹爪在农业采摘中受到大量关注,正是因为传统刚性夹爪很难适应果蔬形态变化和低损伤采摘要求。关于农业软体夹爪的综述指出,这类研究重点关注自动采摘任务,分析不同作物是否已有自动化方案,以及不同植物学特征下常用的采摘方法。
换句话说,末端执行器不是越复杂越好,而是要和作物本身匹配。
草莓需要低损伤和果柄处理;蘑菇需要湿滑表面下的柔顺夹持和分离;番茄需要避开果体压伤;苹果要考虑拉、扭、弯等脱离方式;蓝莓要处理果粉、成熟度和轻柔采摘。
不同作物需要不同的“手”。
软抓技术分类来自PubMed Central《Soft Grippers for Automatic Crop Harvesting: A Review》
06
视觉强了以后
末端执行器还要承担“误差缓冲”
农业机器人不可能完全没有误差。
相机有误差,深度估计有误差,手眼标定有误差,机械臂运动有误差,作物本身还会晃动。
视觉强,可以减少大误差,
但很难消灭所有小误差。
这时,末端执行器必须承担误差缓冲。
一个好的末端执行器,应该允许机器人不是每一次都以完美角度、完美位置接触目标,也能完成采摘。
它需要通过柔性材料、顺应结构、接触面积设计、力控反馈和动作冗余,把视觉和机械臂残留的误差“吃掉”。
这就是为什么有些研究特别强调夹爪对定位误差的鲁棒性。前面提到的草莓采摘机器人论文《Development and field evaluation of a strawberry harvesting robot with a cable-driven gripper》,就把“夹爪对视觉模块定位误差具有鲁棒性”作为系统亮点之一。
这对产业化非常重要。
因为实验室里可以让目标摆得很标准,但真实农场不会。真实场景里,果子有的偏一点,有的藏一点,有的被叶子挡一点,有的靠近枝条一点。
视觉系统把机器人送到大致正确的位置以后,
末端执行器必须完成最后的适配。
所以,农业视觉越强,末端执行器不是被削弱,而是从“执行零件”变成“误差缓冲器”。
07
末端执行器还决定机器人
能不能接入采后流程
采摘不是最后一步。
很多农业机器人演示视频,只展示从植株上取下果实。但真实生产里,摘下来以后还要进入转运、分级、包装、预冷、冷链。
如果末端执行器只负责“把果子弄下来”,
后面的流程就会断。
比如,草莓不是摘下来随便放就行,果面朝向、放置落差、是否碰撞,都可能影响品质;
蘑菇不只是采下,还涉及切根、分级和放置;
番茄如果是串采,还要考虑果串完整性和后续包装方式。
因此,末端执行器要解决的不只是“取下”,还包括“如何交接”。
它要把果子交给输送带、周转盒、分级工位或包装系统。这个动作如果做不好,前端采得再温柔,后端一摔也会损伤。
这就是为什么未来采摘机器人不能只看识别率和单次采摘成功率。更要看它能不能把“采摘—分离—转运—放置”连成稳定工作流。
图片由AI创作

08
真正成熟的采摘机器人
不是视觉强或末端强,而是两者协同
如果只强调视觉,就容易陷入“看见即采摘”的误区。
如果只强调末端执行器,又容易忽略目标识别、采摘点定位、路径规划和避障。
真正成熟的采摘机器人,一定是视觉和末端协同。
视觉负责判断目标、成熟度、采摘点、可达路径。末端执行器负责接触、夹持、分离、低损伤转运和放置。控制系统负责把二者连起来,让机器人根据视觉信息选择动作,再根据接触反馈调整动作。
视觉本来就不是孤立存在的,它最终要服务于动作。
而动作能不能完成,最终还是落到末端执行器和控制系统。
09
中国采摘机器人下一步
要少讲“识别率”,多讲“有效采摘”
国内很多采摘机器人宣传,
喜欢讲识别率、定位精度、速度、替代人工。
这些指标当然重要,但不够。
终端用户真正关心的是:
摘下来的商品果有多少;
损伤率是多少;
漏采率是多少;
失败后能不能恢复;
连续作业能跑多久;
换一个棚、换一批果,性能会不会掉;
能不能接上分级、转运、包装流程。
这些问题,单靠视觉回答不了。
视觉越强,越应该把评价指标往后推:从“看见多少”推到“摘下多少”,再推到“商品果多少”,最后推到“连续稳定作业多少”。
这也是为什么末端执行器会越来越重要。
它是农业机器人从“感知智能”走向“作业能力”的最后关口。
10
采摘机器人真正的门槛
在“最后一厘米”
农业视觉越强,末端执行器越重要,
本质上是因为采摘机器人的瓶颈正在后移。
当机器人还看不准时,视觉是第一瓶颈。当机器人已经看得越来越准,真正的瓶颈就变成了能不能稳定接触、低损伤分离、可靠转运和准确放置。
这就是“最后一厘米”的问题。
因为它直接决定一台采摘机器人能不能从演示走向作业。
所以,判断一台采摘机器人,不能只看它识别得准不准,也不能只看末端执行器长得像不像“手”。
真正要看的是:视觉给出的采摘点,末端能不能接得住;末端接触目标以后,能不能处理误差、控制损伤、完成分离、接入后端流程。
我们关注农业机器人,也正是从这个角度出发。真正有价值的采摘机器人,不是某个单点参数漂亮,而是视觉、机械臂、末端执行器、力控反馈、采后流程能够形成一套完整作业链。
因为农业机器人最终不是比谁看得更清楚,而是比谁能在真实场景里,把果子稳定、低损伤、可持续地采下来。
#智慧农业#农业机器人#采摘机器人#清华农业#农业机器人开发#农业机器人定制研发#农业机器人研发找陈灏#清华装备院陈灏#农业自动化#末端执行器
清研智慧农业
清研智慧农业源于清华大学天津高端装备研究院智能系统与大数据研究中心,依托清华大学顶尖科研力量与天津产业创新平台,深度融合“软件、智能装备与大数据”三大核心技术,致力于为智慧农业、工业自动化及高端制造领域提供领先的智能化解决方案。
我们不仅开展前沿技术研究,更注重成果转化与产业赋能,已成功研制出农业采收机器人、智能除草系统、农业无人机、高端自动化产线等一系列具有自主知识产权的装备与系统,推动产业向智能化、绿色化、高效化升级,助力中国从“制造大国”迈向“制造强国”。

特别说明

本文部分内容(包括但不限于文字、图片、数据等)来源于互联网公开信息,旨在传递更多资讯,仅供学习交流之用。其版权均归原作者或原始出处所有。
为支持原创,本公众号会尽量标注来源。如您发现本公众号中有内容侵犯了您的合法权益,请立即通过后台留言或添加客服微信等方式与我们联系,我们将在核实后第一时间进行处理。
未经本公众号明确授权,任何个人或组织不得将本文内容用于商业性转载或摘编。转载请联系后台开白;凡从本公众号转载本文至其他平台所引发的一切纠纷、后果及法律责任,均由转载方自行承担,本平台概不负责。
*往期精选*

