同样是抓取,农业机器人的“手”比工业机器人更难
- 2026-06-21 09:58:11
导语
News Today
在工厂里,机器人抓起一个零件,核心考验往往是准不准、快不快、节拍稳不稳。
到了农场,机器人伸出“手”的那一刻,问题立刻变了:它面对的不是尺寸稳定、姿态可控、表面规则的标准件,而是一颗会呼吸、会成熟、会变软、会受伤、还藏在枝叶和茎秆里的活体目标。
抓取这件事,到了农业场景,难度被整个系统抬高了。
01
工业机器人抓的是标准件,
农业机器人抓的是“活体”
工业抓取的基础,是抓取对象的高度可定义。
零件的尺寸、形状、公差、表面状态、供料方式和到位姿态,大多可以通过夹具、治具、送料机构和工位设计提前稳定下来;工业机器人研究里,对抓取系统的讨论也常放在“抓取系统—工件—环境—生产装备”的整体框架下,核心目标是提高重复性和过程稳定性。
2024 年关于工业抓取系统的分类研究,以及 2024 年关于高重复性工业抓取过程设计的研究,都把“环境可控、过程重复、误差可管理”视为工业抓取成立的重要前提。
农业对象恰好相反。
2025 年的一篇文献把果蔬采收末端执行器分成夹持、吸附、包覆、剪切、旋拧等多类路线,背后其实对应的是同一个现实:作物的个体差异太大,没有哪一种“手”能轻易通吃。
即便是同一块地里的同一种果实,大小、成熟度、含水率、果皮强度、果柄连接强度和空间朝向也都会变化。
2025 年一篇《End-Effectors for Fruit and Vegetable Harvesting Robots: A Review of Key Technologies, Challenges, and Future Prospects》文献表述 ,末端执行器之所以始终是核心瓶颈,就在于它必须同时面对作物形态差异、场景遮挡和低损伤要求。
截取MDPI
02
工业抓取最怕抓不住,
农业抓取更怕“抓坏了”
工业领域当然也重视抓取力控制,但许多制造场景的首要问题,是稳定夹持、准确定位和高节拍放置。
农业抓取的约束更多了一层,而且往往更严:你不仅要抓住,还要尽量不留下伤。
2025 年关于软果机器人处理的研究指出,无论是硬夹爪还是软夹爪,都可能对脆弱果实造成损伤;更值得注意的是,很多早期损伤并不会立刻在表面显现,需要通过光谱方法才能识别。
该研究还提出,机器人末端执行器存在传播病原体的卫生风险。也就是说,农业里的“轻轻碰一下”并不总是轻微问题,它可能直接改变商品价值和后续保鲜表现。
这也是农业机器人“手”更难做的一个根本原因。
工业夹爪常常在“夹紧力足够大”与“定位足够准”之间找平衡;农业夹爪还要额外处理“损伤阈值极低”这件事。
2025 年关于无损脆弱果实抓取的研究明确把问题表述为:既要保证抓取可靠性,又要降低早期瘀伤。研究团队甚至提出了包覆式软抓取和视触觉融合方案,专门用来在“抓得住”和“抓不伤”之间找窄得多的控制窗口。
来源sciencedirect
03
工业机器人多在“正面接近”,
农业机器人常常只能“钻进去”
制造业抓取当然也有复杂装配,但大量抓取动作发生在视野清晰、路径明确、工件边界清楚的工位上。
农业场景里,目标常常嵌在叶片、枝条、茎秆、支架和果串之间。
2024 年关于草莓自主采收机器人的经典研究,以及 2025 年关于果蔬采收末端执行器的综述,都把遮挡、拥挤和接近路径受限列为高频难题。
末端执行器在农业里面对的不是一个“能否夹到”的问题,而是“能否在不碰伤周围组织、不扰乱果串、不干扰下一步动作的前提下接近目标”。
这正解释了为什么农业机器人常常需要把“手”做得更特殊。一项苹果采摘研究,提出了由四个软指和一个多模式吸盘组成的末端执行器,专门为了减少与障碍物的干涉,并提高在自然果园里的接近能力。
设计思路本身已经说明,农业末端执行器不是简单把工业夹爪换个材质,而是要把环境干扰直接写进“手”的几何与机理中。
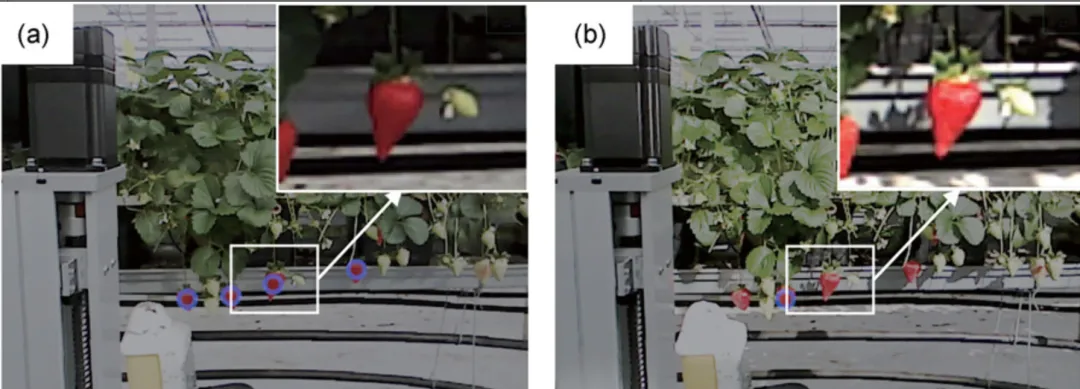
两组截图捕捉同一区域但光强不同:(a)显示低阳光强度,检测到四颗草莓(蓝色圆圈内);(b)显示高阳光强度,仅识别出一颗草莓;来源Wiley onlinelibrary《An autonomous strawberry-harvesting robot: Design, development, integration, and field evaluation》
04
工业夹爪可以只负责“拿”,
农业末端往往还得负责“分离”
在很多工业场景里,抓取和分离是两件不同的事:工件原本就可以被直接拿走,或者分离动作由上游工序完成。
农业不同;果实、花序、叶片、幼苗和菌菇往往天然与植株或基质相连,抓取只是第一步,后面还要切、拧、拉、吸或剥离。
2025 年关于番茄末端执行器的研究就明确把“柔顺抓取”和“切断果梗”组合在一起;2025 年关于小型西兰花采收夹爪的研究,则把实时力反馈引入设计,核心也是为了在切割和抓取之间维持精细平衡。
这会把“手”的难度一下子抬高。
工业夹爪的成功标准,常常是抓牢并准确放下;农业末端执行器的成功标准,往往是一连串动作都不能出错:接近、贴合、施力、分离、转运、放置。任何一步多一点、少一点,都可能带来损伤、漏采或掉落。
2025 年关于苹果真空吸附末端执行器的研究,也是在“定位、吸附、分离”一整套链条里讨论末端设计,而不是孤立讨论“抓”这个动作。
05
工业抓取依赖重复性,
农业抓取依赖适应性
工业机器人当然也在走向柔性制造,但其根基仍然是高重复性。
2025 年关于机器人装配的综述仍把精确感知、末端执行器、控制方法和误差恢复作为关键技术,说明工业抓取的基本任务还是围绕重复性、精度和过程能力展开。
农业“手”的底层要求却更接近适应性:大小变了怎么办,表面湿了怎么办,果柄偏了怎么办,成熟度不同怎么办。
也正因为这样,农业场景里软体抓手、仿生包覆结构和多模态感知被推得更快。
2024 年关于小中型果实软夹爪的研究强调,软体系统更适合非结构化环境和脆弱对象;2025 年和 2026 年的新研究则继续往视触觉融合、曲率传感、力反馈和局部计算上推进,目的都很一致:让“手”在接触瞬间自己感知对象状态,而不是完全依赖预设模型。
06
国际公司的路线,
本身就在说明“手”这件事有多难
看国际公司的做法,这个判断会更直观。
Tevel 的果园采收机器人采用飞行平台接近果实,官方强调其系统可以采摘从约 50 克到 700 克的不同水果,并持续记录每个果实的数据。它主要采用吸附式抓取思路,这条路线适合表面较规则、接近球形、果面较平滑的果实。换句话说,Tevel 不是在做一只“万能手”,而是在用平台与场景设计,降低末端执行器的难度。
Dogtooth 的草莓机器人走的是另一条路。它通过抓住草莓果柄并切断茎秆来采摘,同时在机上完成多视角质量检查。这里最值得注意的不是它会采摘,而是它刻意避开直接夹压果体,把主要受力位置移到果柄附近,用“夹柄+切柄”降低对果面的干扰。技术路线本身已经说明:农业机器人一旦面对软果,末端执行器首先要处理的,常常不是“抓得住”,而是“尽量别碰到最脆的地方”。
MetoMotion 的温室番茄机器人GRoW则强调系统能够识别成熟果实并直接装箱,Ridder 和欧盟科迪斯的公开报道也提到其平台依靠三维视觉、双臂和车载系统完成采摘与装箱。番茄场景说明,“手”的难点有时并不只在果体接触,还在于果串关系、成熟判断、箱内摆放和连续节拍。末端执行器在这里必须与视觉、移动平台和包装动作一起设计,单独优化“夹爪”很难解决全链条问题。
07
所以农业机器人的“手”,其实是一套小系统
这也是行业里最容易被忽视的一点。
工业夹爪很多时候可以被理解为标准部件;
农业末端执行器越来越像一个小系统,里面往往同时包含材料、机构、力控、感知、分离机理和卫生设计。2025 年的文献综述就明确指出,果蔬采收末端执行器的发展方向正在从单一机械结构,走向多功能集成与智能感知;一篇关于脆弱果实无损抓取的系统综述也有文献把系统设计、末端执行器、视觉反馈和触觉反馈放在同一框架里讨论。
从这个角度看,“同样是抓取,农业机器人的手比工业机器人更难”并不只是因为农业环境更复杂,而是因为农业里的“手”承担了更多角色。
它既是接触界面,也是感知前端;
既要完成夹持,也要完成分离;
既要对付非标对象,也要守住商品价值;
既要追求成功率,还要兼顾损伤、卫生和后续包装。这已经不是一个单零件问题,而是一整个接触系统问题。
工业机器人把“手”做成标准件,是制造业成熟的结果。
农业机器人把“手”越做越复杂,则恰恰说明农业自动化还在穿越最难的一段深水区。
谁能先把这只“手”做稳,谁才更有机会把感知、控制、作业质量和商业化一起往前推。对真正做农业自动化的人来说,末端执行器从来都不是一个附属零件,它往往就是整台机器最难、也最值钱的地方。
围绕视觉识别、柔顺接触、精准执行和复杂场景适配展开的系统研发,也正是农业机器人定制化落地最核心的能力之一。
#智慧农业#农业机器人#采摘机器人#清华农业#农业机器人开发#农业机器人定制研发#农业机器人研发找陈灏#清华装备院陈灏#农业自动化
清研智慧农业
○
○

陈 灏
智慧农业项目负责人
清华装备院智能系统与大数据分析中心主管

特别说明

本文部分内容(包括但不限于文字、图片、数据等)来源于互联网公开信息,旨在传递更多资讯,仅供学习交流之用。其版权均归原作者或原始出处所有。
为支持原创,本公众号会尽量标注来源。如您发现本公众号中有内容侵犯了您的合法权益,请立即通过后台留言或添加客服微信等方式与我们联系,我们将在核实后第一时间进行处理。
未经本公众号明确授权,任何个人或组织不得将本文内容用于商业性转载或摘编。转载请联系后台开白;凡从本公众号转载本文至其他平台所引发的一切纠纷、后果及法律责任,均由转载方自行承担,本平台概不负责。

*往期精选*
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 王二涛,去南京农业大学了
- 土地流转规模经营与农业新质生产力最大的障碍是被“固化”的地
- 福建省农业农村厅关于印发《高致病性禽流感防控应急实施方案(2026年版)》的通知
- 巴楚县:春日繁花绘就特色农业增收画卷
- 津农精彩 | 市农业农村委赴静海区督导中央环保督察反馈问题整改工作
- 河北保东农业机械有限公司
- 【考研初试资料】2027年吉林农业大学考研历年真题|大纲|参考书目|笔记|课件|复习提纲|题库|模拟卷
- 中国农业科技国际交流协会果树分会在郑州成立
- 云南的大学知多少-云南农业大学
- 南京农业大学黎星辉团队阐明茶树CsMYB1-CsMYB82/CsbHLH48-CsCAD4模块调控炭疽病抗性的分子机制
