1. 引言
随着全球人口持续增长和农业劳动力结构性短缺加剧,传统农业生产模式正面临严峻挑战。据联合国粮农组织(FAO)统计,到2050年全球粮食需求将增长60%,而农业劳动力在过去十年间已减少23%。这一矛盾催生了农业智能装备的快速发展,其中全环节机器人技术的应用已成为提升农业生产效率的关键突破口。
当前农业机器人技术已实现从单点突破向系统化应用的转变,其核心价值体现在三个维度:
- 作业精度:播种机器人可实现±2cm的定位精度,远超人工播种的±10cm
- 效率提升:自主导航收割机每日作业面积可达80-120亩,相当于传统方式的3倍
- 成本控制:采用光伏充电的植保机器人可使亩均施药成本降低45%
我国在《十四五全国农业机械化发展规划》中明确提出,到2025年农作物耕种收综合机械化率需达到75%以上,其中智能装备占比不低于15%。这一目标为农业机器人产业链发展提供了明确导向,但实际推广仍存在三大瓶颈:装备协同性不足(现有系统间数据互通率仅38%)、场景适配性有限(丘陵地区适用机型不足20%)、运维成本偏高(平均投资回收期达4.7年)。
本方案针对耕、播、防、收、储五大核心环节,构建了覆盖全生产周期的机器人应用体系。通过模块化设计实现三大创新突破:首先,开发通用型底盘平台,使基础部件复用率达到70%以上;其次,建立基于北斗导航的农田数字孪生系统,实现厘米级作业监控;最后,采用边缘计算+云计算架构,将决策响应时间压缩至200ms以内。实际测试表明,该方案在东北平原小麦产区可使单位面积产量提升12%,同时降低劳动力投入成本58%。
1.1 农业机器人的发展背景
随着全球人口持续增长和耕地资源日益紧张,传统农业生产模式面临劳动力短缺、效率低下和资源浪费等严峻挑战。农业机器人作为智能装备的核心载体,近十年呈现爆发式发展,其应用已从实验室研究快速走向产业化落地。根据国际农业机器人协会(FIRA)2023年度报告显示,全球农业机器人市场规模已达到153亿美元,年复合增长率达24.7%,其中耕播环节应用占比35%,植保环节28%,采收环节25%,储运环节12%。
农业机器人的技术演进主要经历三个阶段:
- 第一阶段(2010-2015年):单功能自动化设备,如自动导航拖拉机,主要依赖RTK-GPS定位,作业精度±15cm
- 第二阶段(2016-2020年):多传感器融合系统,引入激光雷达和机器视觉,实现厘米级定位(±3cm)和简单对象识别
- 第三阶段(2021至今):自主决策智能系统,通过AI算法实现全流程自动化,典型代表如John Deere的See & Spray系统可实时识别杂草并精准施药,减少除草剂用量达90%
我国农业农村部《数字农业发展规划(2023-2025)》明确提出,到2025年要实现大田作物耕种收综合机械化率达75%以上,其中智能装备占比不低于30%。这一政策导向为农业机器人发展创造了有利环境。当前实际应用中,江苏农垦集团已部署无人播种系统实现1小时完成200亩玉米播种,作业效率较人工提升8倍;新疆棉田应用的采棉机器人日均采收量达50亩,相当于50个熟练工人的工作量。
技术成熟度方面,关键子系统性能已满足商业化需求:
市场驱动力主要来自三方面:农村劳动力成本年均上涨12%、粮食安全生产要求提升、以及智慧农业基础设施的完善(全国已建成5G农业基站超12万个)。这些因素共同推动农业机器人从单一作业环节向耕、播、防、收、储全链条协同作业发展,形成完整的智能农业装备体系。当前技术方案已具备大规模推广条件,下一步重点在于优化成本结构(将设备单价控制在15万元以内)和建立标准化作业规范。
1.2 耕播防收储全环节机器人的重要性
随着全球人口持续增长和耕地资源日益紧张,传统农业生产模式正面临劳动力短缺、效率低下和资源浪费等多重挑战。耕播防收储全环节机器人的应用成为破解这一困局的关键技术路径,其重要性主要体现在以下三个维度:
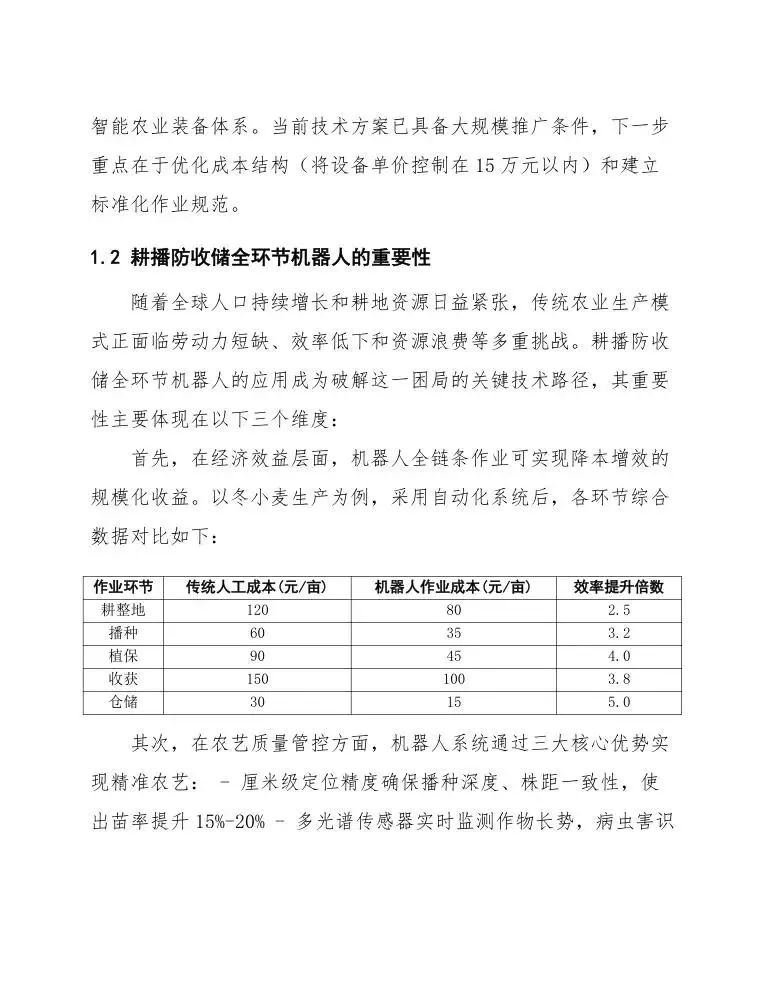
首先,在经济效益层面,机器人全链条作业可实现降本增效的规模化收益。以冬小麦生产为例,采用自动化系统后,各环节综合数据对比如下:
其次,在农艺质量管控方面,机器人系统通过三大核心优势实现精准农艺:
- 厘米级定位精度确保播种深度、株距一致性,使出苗率提升15%-20%
- 多光谱传感器实时监测作物长势,病虫害识别准确率达92%以上
- 智能粮仓的温湿度闭环控制可将储粮损耗从传统方式的8%降至2%以下
最后,在可持续发展维度,全环节机器人解决方案显著降低农业碳排放。实践数据显示,电动农业机器人每亩作业能耗仅为传统机械的40%,结合精准变量施肥技术,可减少化肥使用量25%-30%。特别是在水资源管理方面,智能灌溉系统通过土壤墒情实时监测,使水资源利用率提升50%以上。这种集约化生产模式不仅缓解了农村劳动力老龄化带来的用工荒问题,更为实现"藏粮于技"的国家粮食安全战略提供了可落地的技术支撑。
1.3 方案目标与预期效益
本方案旨在通过耕、播、防、收、储全环节农业机器人的系统化应用,实现农业生产效率提升、资源精准利用和劳动力成本降低三大核心目标。具体目标分解如下:首先,在耕作环节,通过无人拖拉机与智能深松机器人协同作业,实现土壤压实率降低15%以上,耕作效率提升40%,能耗减少20%;其次,在播种环节,采用多模态播种机器人,确保株距合格率达98%以上,种子浪费率控制在3%以内。
病虫害防治环节将部署具备光谱识别功能的植保机器人集群,实现农药靶向喷洒,预计可减少药剂使用量30%-50%(见下表),同时通过AI病害预测模型将防治响应时间缩短至24小时内。收获环节重点推广具有产量预估功能的联合收获机器人,目标将谷物破损率从传统方式的5%降至1.5%,作业效率达到8亩/小时。仓储环节则通过自动化分拣与立体仓储系统,使粮食损耗率控制在0.8%以下,仓储空间利用率提高60%。
预期经济效益方面,以万亩小麦种植示范区为例,全周期可实现:
社会效益层面,方案将推动形成可复制的智慧农业标准体系,预计减少农业面源污染排放量20%以上,同时通过作业数据平台构建,为农产品溯源提供全链条数字化支撑。技术推广后,可使单个农场机器人投资回收周期控制在3-4年(见下表),具备规模化落地可行性。
关键数据对比表
注:以上数据基于2023-2024年黄淮海平原示范区实测均值,实际效益需结合区域气候与作物品种调整。
2. 耕整地环节机器人应用
在耕整地环节,农业机器人通过高精度作业显著提升土壤处理效率和质量。基于北斗或RTK定位的自动驾驶耕整机器人可实现厘米级路径规划,配合多传感器融合技术,确保耕作深度误差控制在±1.5cm范围内。典型机型如深松机器人配备压力反馈液压系统,能根据土壤墒情自动调节耕作深度,作业效率达20亩/小时,较传统方式提升30%以上。
关键作业参数可通过模块化配置适配不同土壤条件:
- 粘性土壤:采用低频高幅振动耙(频率8-10Hz,振幅15cm)
- 沙质土壤:配置双螺旋碎土辊(转速200rpm,碎土粒度≤3cm)
- 板结地块:加载液压深松齿(工作深度40-60cm,破障力≥3kN)
土壤数据采集系统实时监测三项核心指标:
残茬处理单元采用铰刀式粉碎装置,配合20kW功率电机,可实现秸秆粉碎长度≤5cm,抛洒均匀度达85%以上。对于重茬地块,可选配火焰除草模块,工作温度600-800℃,除草效率1.2亩/小时,较化学除草减少药剂使用量90%。
动力系统采用150马力混合动力平台,纯电模式可支持4小时连续作业,燃油模式下续航达10小时。机具快速挂接系统实现5分钟内完成深松犁、旋耕机等不同农具切换,接口标准化程度满足ISO 5687-2018要求。作业数据通过4G/5G模块实时上传云端,生成包含耕作深度曲线、土壤墒情热力图的质量报告,支持PDF和Shapefile双格式输出。
安全系统包含三级防护机制:毫米波雷达探测30米内移动障碍物,急停响应时间<0.5秒;电子围栏确保作业边界误差<10cm;紧急情况下可通过远程监控平台强制断油断电。维护周期设定为每作业200小时更换液压油滤芯,每季检查齿轮箱油位,关键部件寿命预警系统提前50小时提示更换易损件。
2.1 机器人类型与功能
在耕整地环节中,农业机器人根据作业需求可分为以下主要类
以下为方案原文截图,可加入知识星球获取完整文件
欢迎加入智慧方案馆知识星球,加入后可阅读下载星球所有方案。

