文章概要:
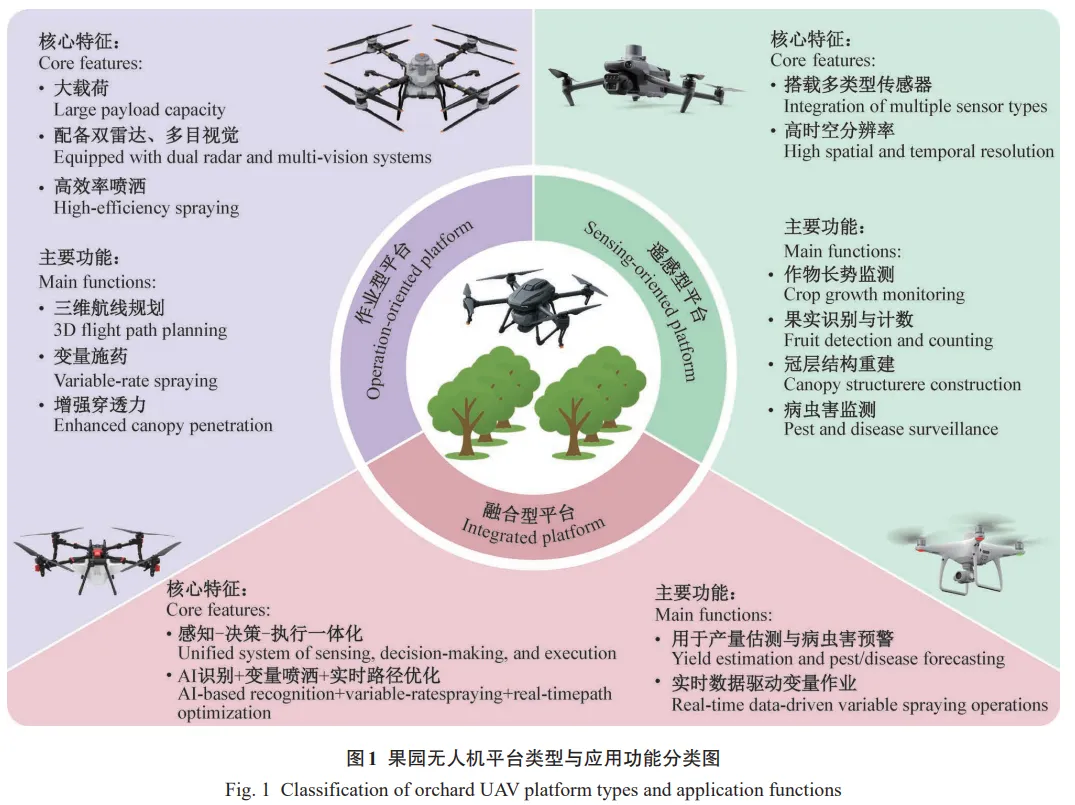
无人机凭借高机动性与平台扩展性,在果园遥感监测、变量施药与智能决策等方面展现出显著优势。该文系统梳理了果园无人机平台的发展路径,按遥感型、作业型与融合型进行分类,剖析其在果树结构重建、果实识别、变量施药中的关键技术进展。
研究发现,果园无人机技术经历了从“感知赋能”到“智能协同”的四个演化阶段:早期(~2015年)以信息采集为主;2015-2019年进入多源融合,集成多光谱、LiDAR等传感器;2019年后人工智能嵌入,实现果实检测、病虫害识别;2022年起逐步构建“感知-决策-执行”的智能闭环。基于Web of Science文献计量分析显示,中国、意大利、西班牙与美国是主要研究力量,研究热点从生理指标监测向结构感知、智能作业控制演进。
该文深入探讨当前面临的感知精度不稳定、变量控制滞后、系统闭环构建困难等关键问题,并从多模态感知、边缘智能、果园数字孪生与空-地协同作业等方向展望未来突破,为构建“智能果园”提供理论参考。
本论文得到国家自然科学基金项目(31761133019),国家重点研发计划项目(2022YFD2001400),国家现代农业产业技术体系资助项目(CARS28),中国农业大学 2115人才培育发展支持计划项目(2115-89052)的资助。