农业机械自动导航技术是精准农业的核心支撑,对提升农业生产效率和质量、降低资源消耗具有重要意义。该文系统阐述了国内外农机自动导航技术的研究进展,重点分析了导航定位、导航控制技术的发展现状与趋势。
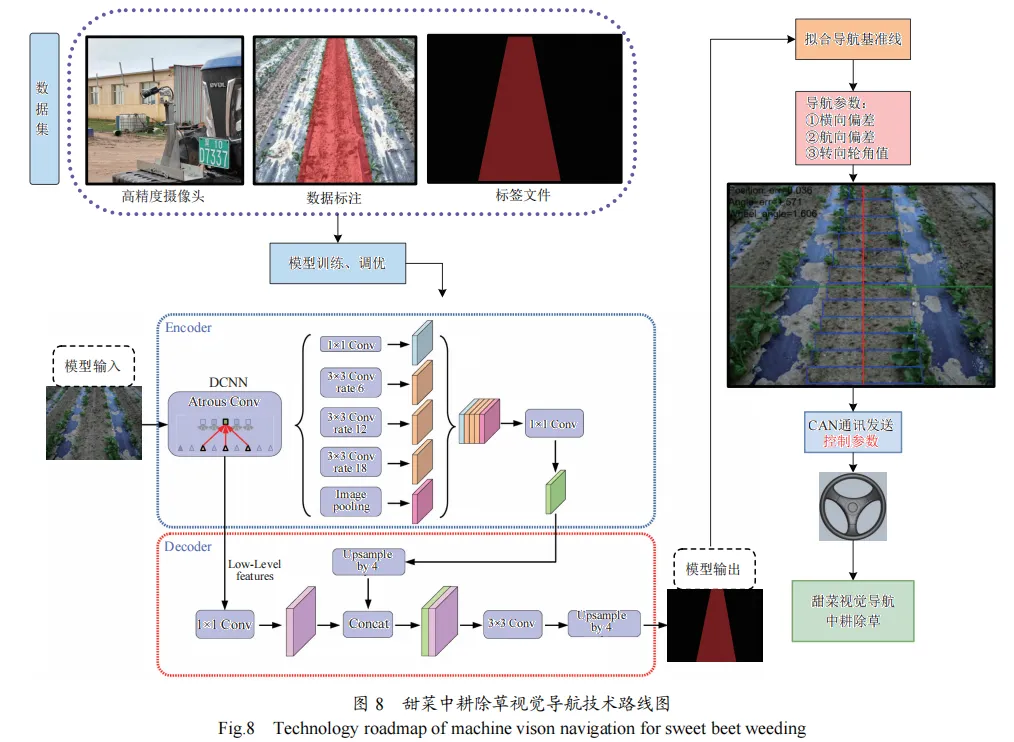
在导航定位方面,高精度全球导航卫星系统(global navigation satellite system,GNSS)、机器视觉(传统算法与深度学习)及激光雷达(light detection and ranging, LiDAR)技术已实现厘米级绝对或相对定位,多传感器融合(GNSS/视觉/LiDAR)成为提升复杂环境适应性的主流方案。导航控制技术中,液压与电动转向系统分别适配重载与中小型农机,模型预测控制、自适应纯追踪及智能优化算法显著提升了路径跟踪精度与鲁棒性,尤其在坡地、侧滑等复杂工况下表现突出。
应用实践表明,国际领先企业(如John Deere、CLAAS)已实现高精度导航产品规模化应用,国内的华测导航、上海联适等企业的农机导航技术产品依托北斗卫星导航系统在多场景中取得进展。未来研究应聚焦多模态传感器智能融合、农机导航路径跟踪控制算法优化及导航-作业一体化集成,推动农机自动导航技术向智能化、普适化方向发展,助力农业现代化转型升级。