作者及期刊信息详情(发表时间:2025.12.3)
农业机器人群体智能作为引领现代农业机器人战略性前沿技术之一,在提高农业生产效率和可持续性方面具有巨大潜力,对于实现安全可靠、自主高效、精准智能,支撑现代农业发展具有极其重要战略意义。
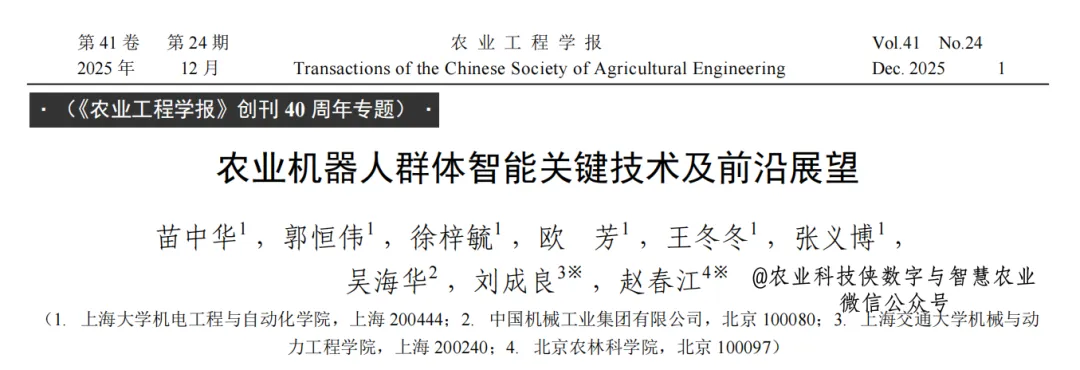
全文系统综述农业机器人群体智能的核心内涵、基本要素、关键技术与发展趋势。首先,阐释群体智能的概念起源、核心特征以及协同优势,提出了农业机器人群体智能的“个体自主-信息共享-群体协同”概念体系;其次,围绕群体智能的“协同感知-协同规划-协同控制-地空跨域”共性关键技术链路,从基本内涵、研究现状及团队成果分别展开叙述,介绍群体智能技术在智慧农场中的典型应用;最后,指出了农业机器人群体智能的前沿展望与发展趋势。(鉴于篇幅有限,本推文主要介绍“群体智能技术在智慧农场中应用”,原文还包括“群体智能概念与内涵”、“农业机器人群体智能概念体系”、“农业机器人群体智能共性关键技术”及“农业机器人群体智能发展趋势与前沿展望”等详细内容。全文内容获取途径:本公众号后台回复“525”)
群体智能技术通过多机器人协同、动态任务分配和实时通信,为智慧农场提供了高效、精准的解决方案, 显著推动了农业的发展。2025 年,全球农业机器人市场规模预计从 2024 年的 166 亿美元增长至 1 035 亿美元,群体智能在优化资源利用、降低劳动强度和促进可持续发展方面展现出巨大潜力。本节聚焦于田间农业机器人领域,分析了代表性案例与企业实践,以期为农业机器人群体智能的进一步研究与应用提供参考。
田间农业机器人主要应用于作物表型监测、农情巡检、土壤墒情检测、杂草识别与靶向除草、土地精细平整及特种作物选择性收获等任务。其核心技术体系涵盖高精度导航定位、机器视觉感知、智能决策算法、自主路径规划与运动控制,以及多模态作业执行机构的协同控制等关键环节。在田间作业中,群体智能技术已逐步应用于“耕、种、管、收”等高劳动强度环节,并展现出巨大的应用潜力。
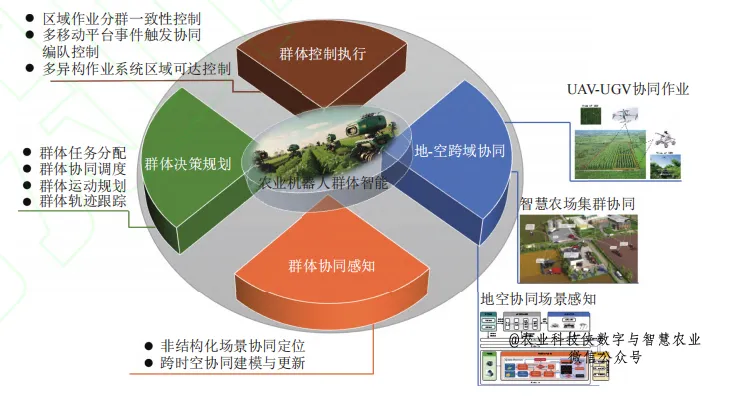
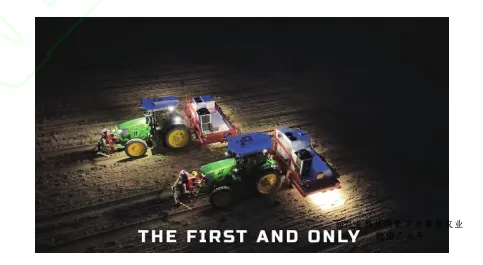
针对田间收获场景,IIDA 等开发的多机协同稻谷收割系统由两台改装的 4 行喂入式联合收割机器人组成,配备多 GNSS 接收机、GPS 罗盘及 IMU,实现高精度路径跟随。两机通过 760 MHz 无线调制解调器实时交换位置、姿态及作业状态信息,并基于相对位置与运动状态的判断实施避碰策略,包括安全距离控制、速度调节及转向避让等机制。作业流程采用先由人工驾驶机预留转向空间,再由两台无人收割机沿规划的螺旋路径同步作业 (图 1)。
田间试验表明,该系统可在无碰撞的情况下完成协同收获,显著提升作业效率,验证了无线通信与多机协同控制在大田群体作业中的可行性与有效性。满忠贤等[117] 针对多台无人化收获机与运粮车辆的协同效率问题,构建了改进型连续时间马尔科夫链模型,对协同收获过程中的状态转移进行建模与优化,多机调度示意图如图 2。该方法以最小化非作业时间为目标,结合实时作业参数预测各收获机的卸粮时间,动态调整卸粮顺序与调度策略,实现收获—卸粮—转运全流程的自主协作。在华南地区的田间验证中,试验对象为两台不同型号的无人驾驶水稻收获机与一台运粮车,作业场景涵盖同田块协同和跨田块转运两类典型情况。结果显示,相较于传统“仓满召唤”卸粮模式,收获机 1 和收获机 2 的作业完成时间减少了 10.25% 和 17.28%,运粮车的作业完成时间减少了 10.71%,协同收获平均作业完成时间减少了 13.58%,有效缓解了等待卸粮造成的作业瓶颈。
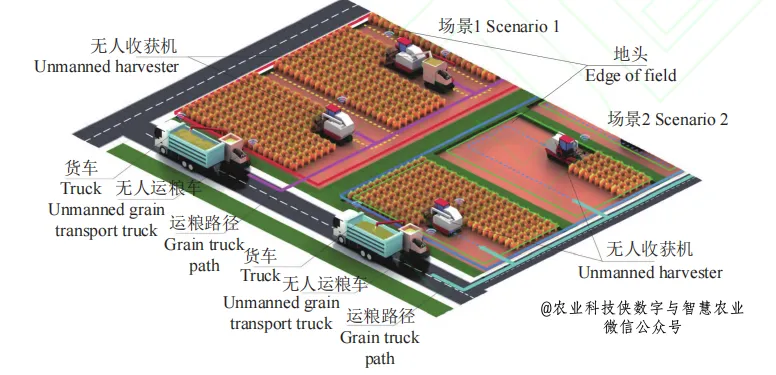
针对田间管理场景,欧盟资助的 RHEA 项目[118] 提出了由 UAV 与 UGV 组成的集群协同除草系统(图 3)。其核心是“感知-规划-控制”的闭环流程:UAV 首先获取田间航拍影像,生成杂草分布图;随后任务被分配给地面机器人集群,搭载条带喷雾器、冠层喷雾器和火焰除草机等多类农具,实施精准靶向处理。该体系旨在显著减少 75% 化学农药投入,提高作物质量与人类健康安全。
SwarmFarm 公司开发的轻型农业机器人集群则依托云端优化与实时监控,形成闭环的“感知-决策-执行”体系,实现精准施肥与除草,如图 4。其低压行驶设计有效降低了土壤压实,并支持可持续的间作模式[119]。Carbon Robotics 的 LaserWeeder(图 5)系统将高能激光技术与群体协调机制结合,利用计算机视觉精准识别杂草,并通过激光脉冲进行无化学剂清除,彻底避免农药使用。其多机协同进一步扩大了作业规模,提升了效率与可持续性,与传统化学除草剂相比,激光除草使杂草覆盖减少 45%,密度减少 66%,杂草生物量减少 97%,作物发育不良低于 1% [120]。Naïo Technologies 公司推出专为蔬菜田间设计的自主除草机器人(图 6),支持多机编队作业,实现复杂环境下的路径规划与协同操作[121]。其模块化设计兼容多种农具,覆盖播种、除草、培土等环节,减少对人力和农药的依赖,为蔬菜生产提供智能化解决方案。
图5 Carbon Robotics 公司开发的 LaserWeeder
图6 Naïo Technologies 公司开发的农业机器人
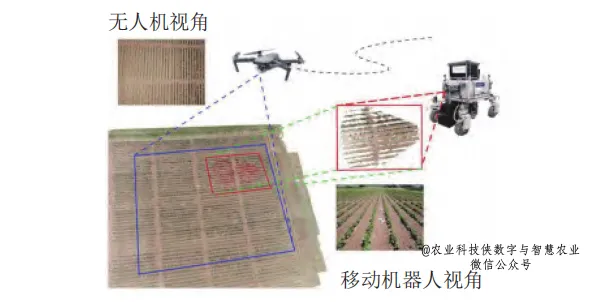
另外,在大田复杂场景协同建图方面,Potena 等[113]提出 AgriColMap 框架(图 7),以“空-地”协同建图为切入点,引入大位移稠密光流思想,通过融合植被指数与数字表面模型的多模态网格表征,显著缓解了农业环境纹理重复、结构相似导致的匹配歧义问题。实验结果表明,该方法在 30% 方向尺度误差、5 m 初始位移和11.5°初始偏航的严苛条件下,仍可实现厘米级配准精度,平均平移误差<5 cm,旋转误差<0.1°。AgriColMap 不仅为地空异构无人系统提供了高鲁棒性、可移植的地图共享机制,也为后续群体智能任务规划、资源调度及精准作业奠定了统一的时空基准。
农业科技侠交流群
入群可添加小编微信(扫描下方二维码,备注:来意-姓名-单位,若二维码添加失败,请公众号后台私信留言“入群”)
投稿、宣传推广、开白等请在本公众号后台回复“1”
转载请注明来源:本文转自农业科技侠数字与智慧农业微信公众号
编辑:周远
声明:本文旨在前沿分享,若有编辑等问题,敬请后台留言





 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
