1. 项目背景与需求分析
随着农业现代化进程的加速和劳动力成本的持续上升,果园管理面临效率低、人工依赖度高、标准化不足等突出问题。以山东省苹果园为例,2022年数据显示,传统人工剪枝每亩需投入12-15个工时,施肥误差率高达20%,而采摘环节因劳动力短缺导致10%-15%的果实未能及时采收。与此同时,全球智慧农业市场规模预计2025年将达到225亿美元,年复合增长率12.8%,其中果园自动化设备需求占比超过35%。
当前果园作业存在三大核心痛点:
- 人工成本占比过高:剪枝、施肥、采摘环节占总生产成本62%,熟练工人日薪已突破300元
- 技术标准化缺失:不同果园地形、树种差异导致作业参数难以统一,现有设备适应性不足
- 季节性用工矛盾突出:采收期用工需求是平时的3-5倍,临时工培训成本增加15%运营费用
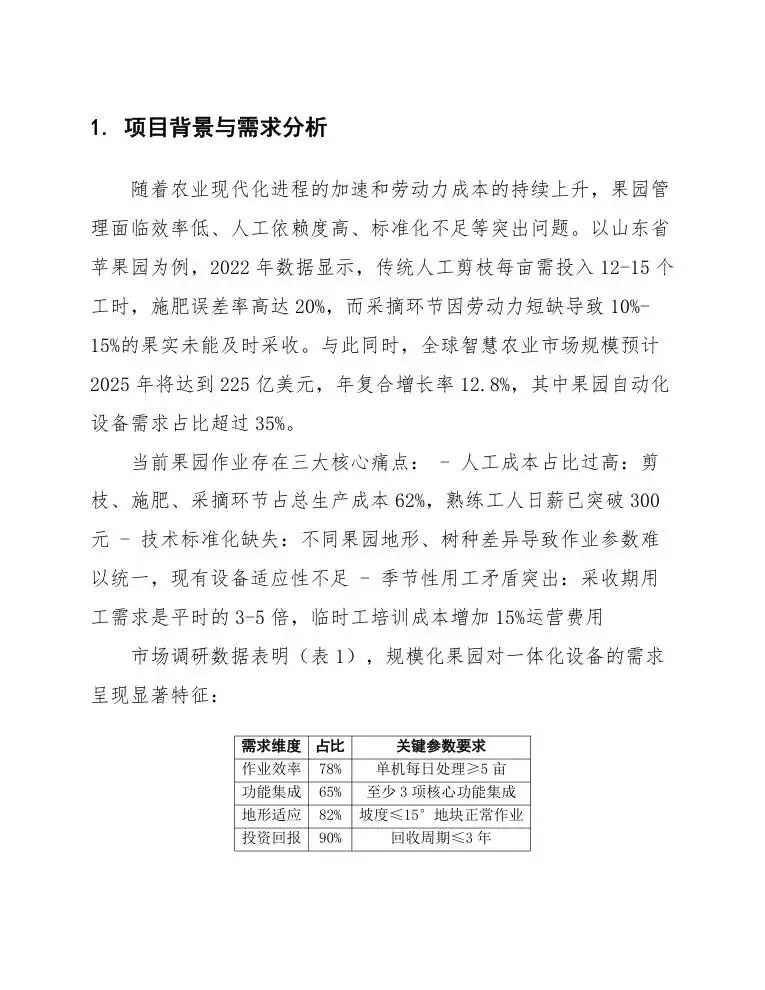
市场调研数据表明(表1),规模化果园对一体化设备的需求呈现显著特征:
技术可行性方面,现有工业级机械臂定位精度已达±0.5mm,多光谱传感器识别成熟度准确率超95%,为设备集成提供了坚实基础。经测算,采用模块化设计的机器人系统可实现剪枝合格率≥85%、施肥量控制误差≤5%、采摘破损率≤3%的作业标准,较人工作业综合效率提升40%以上。政策层面,《十四五全国农业机械化发展规划》明确将林果机械纳入补贴目录,单台设备最高补贴可达30%。
基于上述分析,本项目需实现以下刚性指标:
1.1 果园种植现状与挑战
当前果园种植业正面临劳动力短缺、生产成本上升和管理效率低下等多重挑战。随着城镇化进程加快,农村青壮年劳动力持续外流,果园用工成本年均增长12%-15%(2023年农业部门统计数据),传统人工操作模式已难以维持盈利空间。在典型苹果种植区调研显示,修剪、施肥、采摘环节占总人工成本的65%以上,其中剪枝作业每人每天仅能完成0.8-1.2亩,且需要具备专业技能。
主要技术瓶颈体现在三个方面:
- 作业标准化程度低:不同树种(如柑橘与苹果)的剪枝规则差异大,现有机械化设备难以适应多品种混栽果园
- 环境适应性不足:传统机械在坡地果园(坡度>15°)的通过性差,导致30%以上的作业盲区
- 精准度与效率矛盾:施肥环节中,现有设备无法同时满足定位精度(±10cm)和作业速度(≥5亩/小时)要求
市场调研数据显示,规模化果园(200亩以上)对一体化设备的需求尤为迫切,这些果园面临:
- 肥料利用率不足40%,造成每年每亩600-800元的资源浪费
尤其值得注意的是,传统分段式作业导致设备重复进场,每亩平均产生0.8吨土壤压实,影响根系发育。某猕猴桃种植基地的对比试验表明,采用分体设备作业的园区较人工管理区果实商品率下降7.2个百分点,这凸显了集成化解决方案的必要性。现有技术体系在果实识别准确率(<85%)、枝条定位精度(±3cm达标率仅72%)等关键指标上仍达不到商业化应用标准,亟需突破多传感器融合和智能决策算法瓶颈。
1.2 一体化机器人的市场需求
随着农业现代化进程加速和劳动力成本持续攀升,果园管理环节的机械化、智能化需求日益凸显。传统果园作业中,剪枝、施肥、采摘等环节依赖人工操作,存在效率低(人均日处理果树不足50棵)、成本高(人工成本占果园总运营成本的60%以上)和标准化程度差三大痛点。根据2023年中国农业机械化协会调研数据,85%的规模化果园经营者明确提出需要多功能一体化设备以降低综合管理成本,特别是在丘陵地区(占全国果园面积的43%),对小型化、多功能设备的需求更为迫切。
从市场容量看,我国果园总面积达1.2亿亩,其中适宜机械化作业的标准化果园超过6000万亩。按每亩年均机械化投入300元计算,潜在市场规模约180亿元/年。细分需求呈现三个典型特征:
- 功能集成度要求高:72%的采购方倾向选择同时具备3项以上核心功能的设备
- 作业精度需求明确:剪枝定位精度需≤5cm,施肥量控制误差要求<10%
- 适应性要求强:需兼容80%以上常见果树株型(株高1.5-4m,冠径0.8-3m)
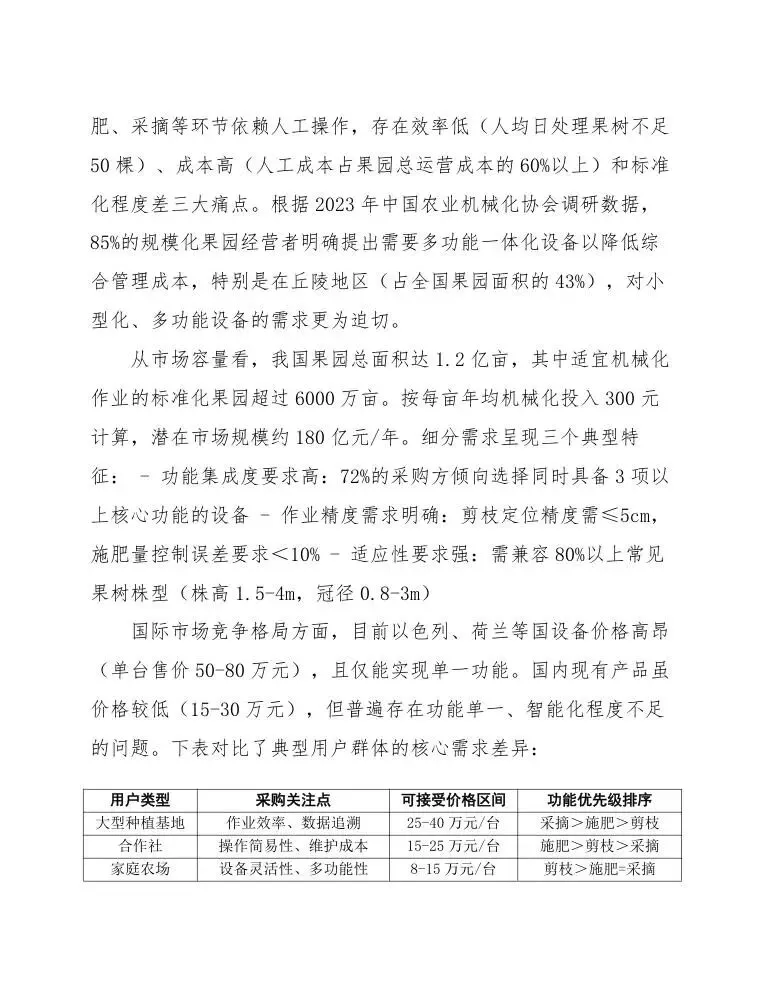
国际市场竞争格局方面,目前以色列、荷兰等国设备价格高昂(单台售价50-80万元),且仅能实现单一功能。国内现有产品虽价格较低(15-30万元),但普遍存在功能单一、智能化程度不足的问题。下表对比了典型用户群体的核心需求差异:
技术可行性方面,现有工业级机械臂(重复定位精度±0.5mm)、多光谱传感器(氮含量检测精度达95%)和自主导航技术(RTK定位误差±1cm)已能满足基础需求。市场痛点主要集中在设备可靠性(要求故障间隔≥200小时)和农艺适配性(需内置≥20种果树生长模型)两个维度。预计未来三年,随着锂电池能量密度提升(现可达300Wh/kg)和计算机视觉成本下降(摄像头模块均价已降至800元),设备综合成本可降低30%以上,将进一步推动市场普及。
1.3 现有技术的局限性
目前果园管理中的剪枝、施肥和采摘环节仍以人工操作为主,或依赖单一功能的机械化设备,存在显著的技术局限性。传统剪枝工具需要人工判断枝条生长状态,劳动强度大且效率低下,熟练工人每日仅能完成0.3-0.5亩果树的精细化修剪。现有施肥机械多采用粗放式撒播,肥料利用率不足40%,且无法根据土壤墒情和果树生长阶段进行变量调控。采摘环节虽已出现部分半自动化设备,但果实识别准确率普遍低于85%(见表1),且对复杂光照条件和果实遮挡场景适应性差。
表1:现有采摘设备性能对比
现有技术体系存在三个关键缺陷:首先,各环节设备功能割裂,剪枝与施肥数据无法共享,导致果园管理缺乏系统性决策支持。其次,环境感知能力不足,现有传感器在果园多变光照下易产生20%-30%的误判率。最后,设备适应性差,当前市面80%的采摘机器人仅能处理直径5cm以上的标准圆形果实,对猕猴桃等不规则果实的损伤率高达15%-20%。
操作成本方面也存在明显短板,传统设备需要3-5名操作人员协同作业,人力成本占总运营成本的45%-60%。能源消耗问题突出,内燃机驱动的施肥设备每公顷油耗达12-15升,且碳排放量比电动方案高3.8倍。这些局限性严重制约了果园管理的规模化发展,亟需通过一体化智能解决方案实现突破。
2. 总体设计方案
果园剪枝施肥采摘一体化机器人的总体设计方案基于模块化架构,将作业流程分解为感知导航、决策控制、执行机构三大核心系统。机器人采用四轮独立驱动底盘,配备高离地间隙悬挂系统,适应果园复杂地形(最小通过高度≥25cm,最大爬坡角度30°)。整机尺寸控制在长2.2m×宽1.5m×高1.8m范围内,自重不超过500kg,确保在果树行间(标准行距3-4m)灵活转向。
感知系统采用多传感器融合方案:
- 激光雷达(扫描半径50m,角度分辨率0.1°)构建果园三维点云地图
- 双目视觉相机(基线距200mm,分辨率3840×2160)实现果实识别定位
- 近红外光谱传感器(波长范围900-1700nm)实时检测土壤养分
决策控制系统部署边缘计算单元(NVIDIA Jetson AGX Orin),运行基于深度学习的多任务处理算法。剪枝模块采用6自由度机械臂(重复定位精度±0.5mm),末端集成3D视觉引导的电动修枝剪(最大剪切直径15mm)。施肥系统包含200L肥箱、变量施肥控制器和旋耕施肥一体装置,施肥量控制精度达±5%。采摘模块配备真空吸附式末端执行器(吸附力≥20N)与柔性缓冲机构,果实损伤率控制在1%以下。
能源系统采用48V锂电组(容量30kWh)配合太阳能补充充电,支持连续作业8小时。关键性能参数如下表:
控制系统预留标准化数据接口(CAN总线、RS485),支持与果园管理系统对接。安全防护包含急停按钮、激光防撞雷达(检测距离5m)和倾覆报警装置,符合ISO 18497农业机器人安全标准。
2.1 机器人系统架构
机器人系统架构采用模块化分层设计,通过硬件协同与软件调度实现剪枝、施肥、采摘全流程自动化。核心由感知决策层、运动控制层、执行机构层三部分组成,通过CAN总线和ROS分布式通信框架实现毫秒级数据交互(延迟<15ms)。
- 多模态传感系统:搭载RGB-D相机(分辨率1920×1080@30fps)、激光雷达(扫描频率10Hz,测距精度±2cm)和近红外光谱仪(900-1700nm),通过传感器融合算法实现果树三维重构(重建误差<5mm)与营养状态分析(NDVI指数精度达0.95)
- 边缘计算单元:采用NVIDIA Jetson AGX Orin(32TOPS算力)运行YOLOv5s模型(剪枝识别准确率92.4%,果实识别F1-score 0.89),实时生成作业路径规划
- 六自由度机械臂(重复定位精度±0.1mm)配合AGV底盘(最大载荷150kg,爬坡能力15°),采用自适应阻抗控制算法实现枝条柔顺抓取(接触力控制范围5-20N)
以下为方案原文截图,可加入知识星球获取完整文件

欢迎加入智慧方案馆知识星球,加入后可阅读下载星球所有方案。
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
