
点击 阅读原文 看往期优质文章
【农科】浙江大学团队:设施农业智能机器人导航关键技术研究进展
- 2026-07-03 14:01:17
【农科】浙江大学团队:设施农业智能机器人导航关键技术研究进展

农业品牌联盟 再小的个体,也有自己的品牌 国内首家农策、农科、农创、农链、农综服自媒体矩阵布局者——品牌农业、智慧农业、数字农业深度研究平台!农业品牌联盟创始人李庆恩以再小的个体,也有自己的品牌为理念,聚焦农策、农科、农创、农链,精准服务新农人、合作社、农场、农企,助力乡村振兴! 中国农业深度研究平台
农业知识共享
农策丨农科丨农创丨农链
再小的个体,也有自己的品牌
图文概要
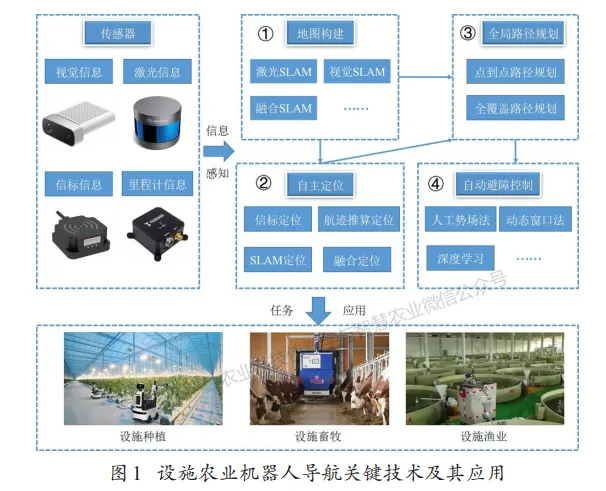
随着科学技术的快速发展和劳动力成本的不断提高,机器人在设施农业领域的应用越来越广泛。设施环境复杂多样,如何让机器人实现稳定、精准、快速的导航仍然是当前需要解决的问题。
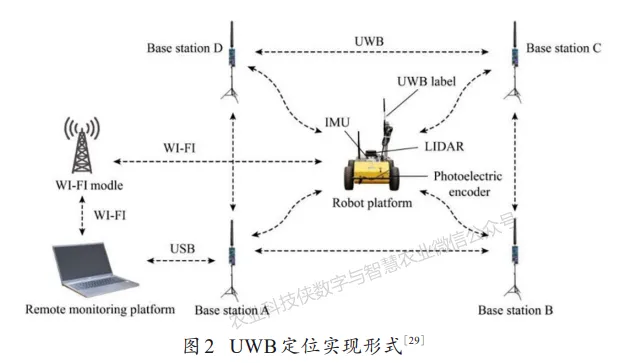
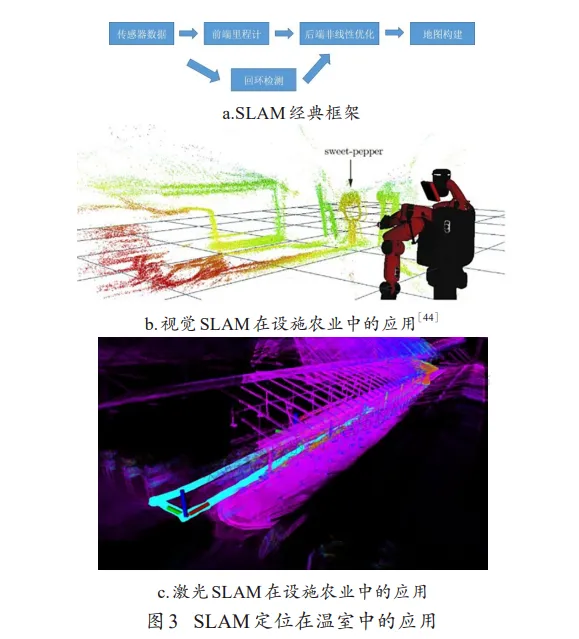
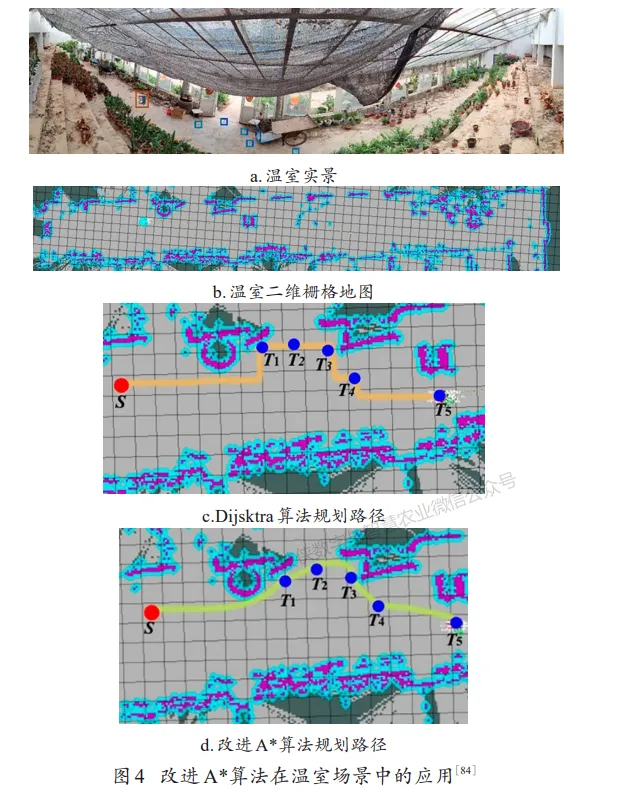
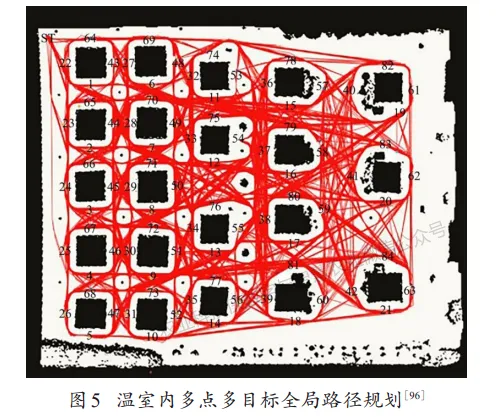
本文基于设施农业智能机器人的自动导航关键技术展开综述。在自主定位与地图构建方面,详细介绍了信标定位、惯性定位、即时定位与建图技术,以及融合定位方法。其中,依据使用的传感器不同,即时定位与建图技术可进一步划分为视觉、激光和融合三种不同类型。在全局路径规划方面,探讨了点到点局部路径规划和全局遍历路径规划在设施农业中的应用。针对规划目标数量的不同,详细介绍了单目标路径规划和多目标路径规划。此外,在机器人的自动避障技术方面,讨论了一系列设施农业中常用的避障控制算法。
其他人正在查看类似内容
【前沿】浙江大学何勇教授团队:基于田间机器人和语义分割的草莓种质资源颜色表型检测 赵春江院士最新报告:农业机器人待攻克核心技术|其团队研发的草莓采摘和轨道喷雾机器人将年底首试 【前沿】 浙江大学杭州国际科创中心-农业机器人团队:基于优化的自主农业车辆在受限地头转弯的运动规划
总结了当前设施农业智能机器人自动导航技术面临的挑战,包括复杂环境、遮挡严重、成本高、作业效率低、缺乏标准化平台和公开数据集等问题。未来研究应重点关注多传感器融合、先进算法优化、多机器人协同作业,以及数据标准化与共享平台的建设。这些方向将有助于提升机器人在设施农业中的导航精度、效率和适应性,为智能农业的发展提供参考和建议。
本文研究论文全文获取途径:后台回复“357”
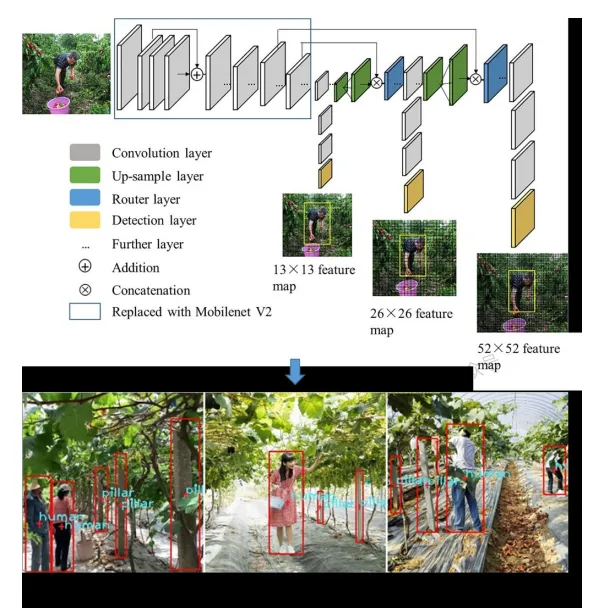
图6 深度学习在避障控制中的应用
写在最后

长按二维码,看更多干货
 戳下面的原文阅读,了解更多
戳下面的原文阅读,了解更多
本文来自网友投稿或网络内容,如有侵犯您的权益请联系我们删除,联系邮箱:wyl860211@qq.com 。

