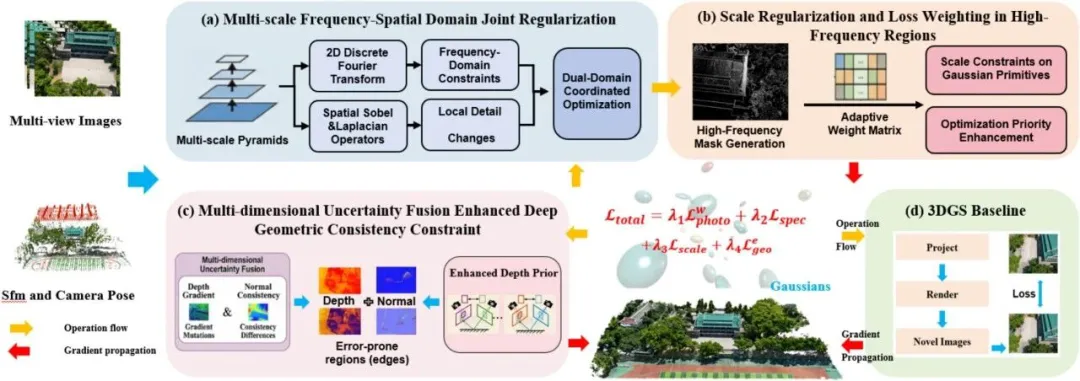
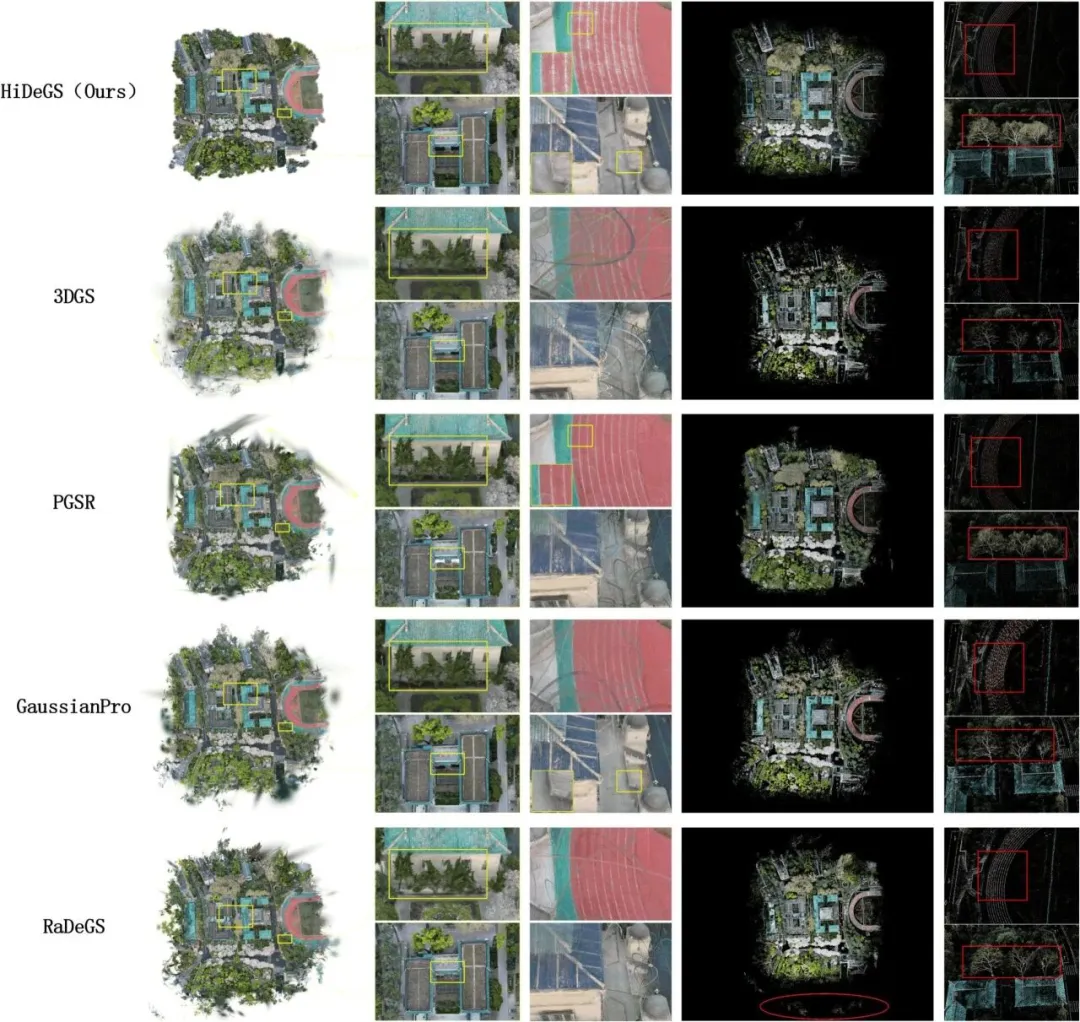
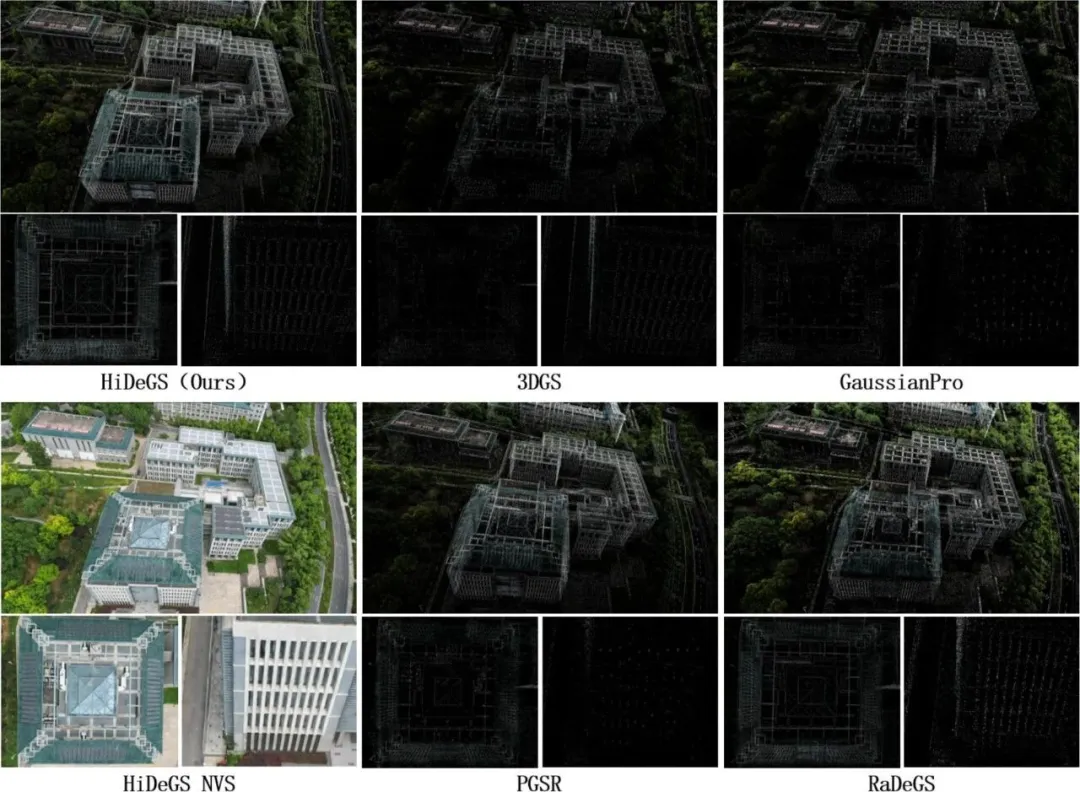
三维高斯溅射(3D Gaussian Splatting, 3DGS)因其高效的渲染性能,已成为近年来三维重建领域的重要新兴技术。然而,在无人机(UAV)多视角重建任务中,该方法仍面临高频细节缺失和多视角几何一致性不足等核心问题,容易导致细微结构模糊、几何形变以及伪影等现象,严重限制了三维模型的几何精度。针对上述瓶颈问题,本文提出了一种用于无人机多视角重建的高频细节增强高斯溅射方法——HiDeGS(High-Frequency Detail-Enhanced Gaussian Splatting),通过多维联合优化提升三维重建的几何精度。
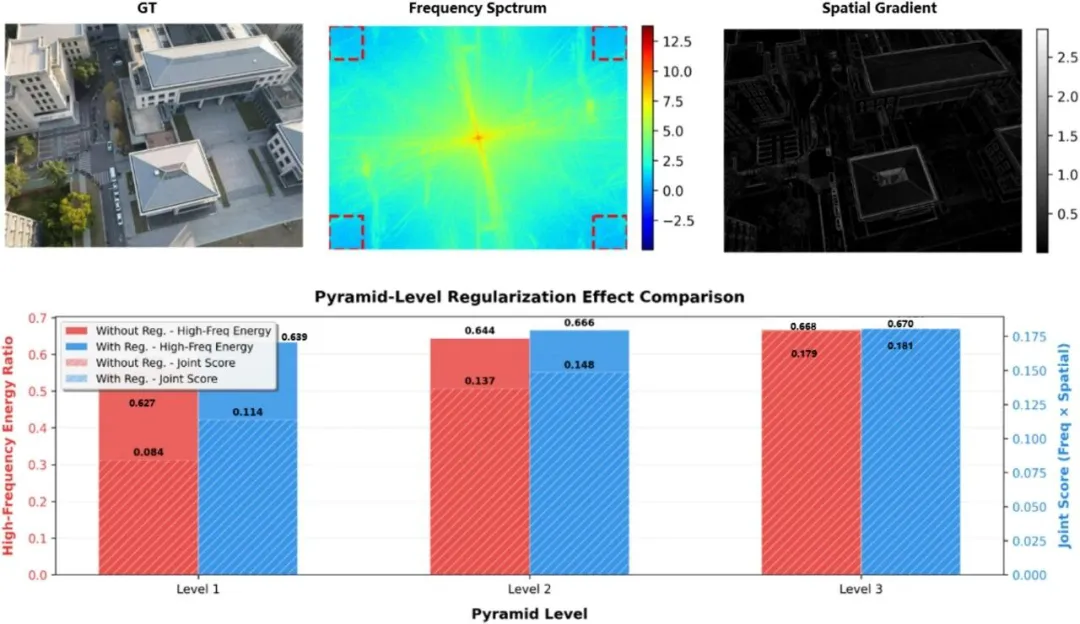
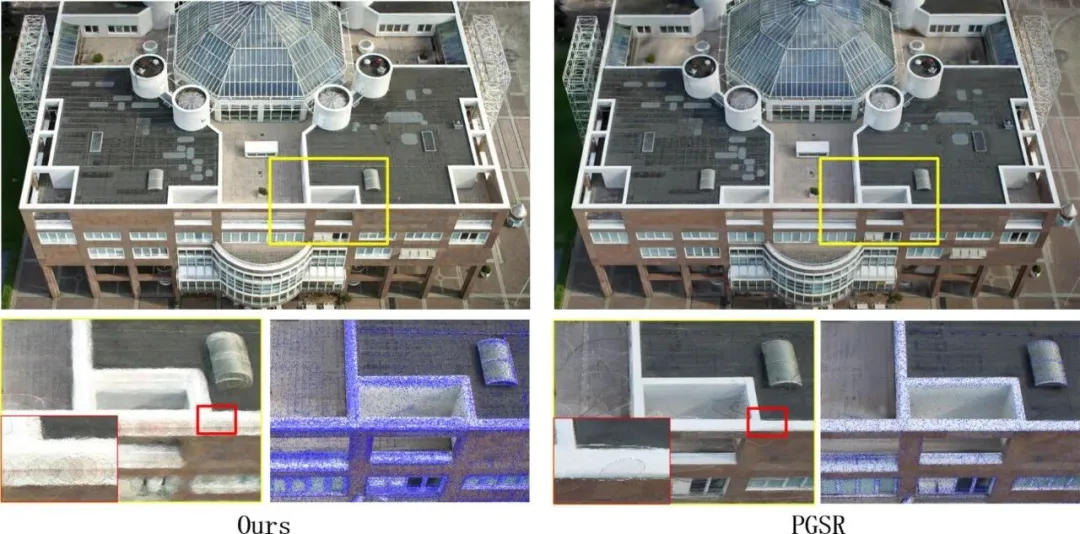
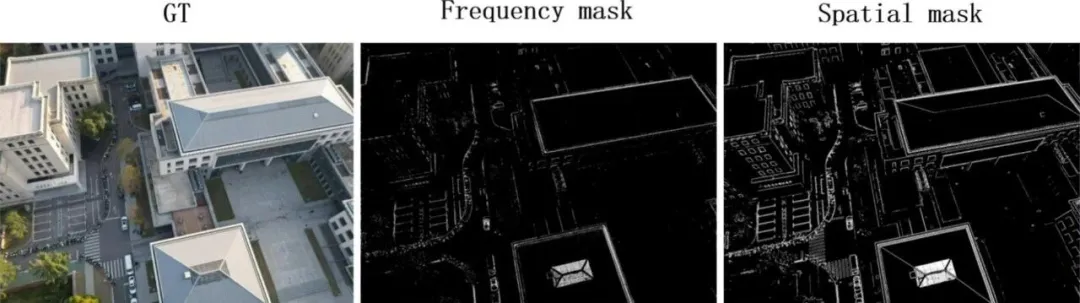
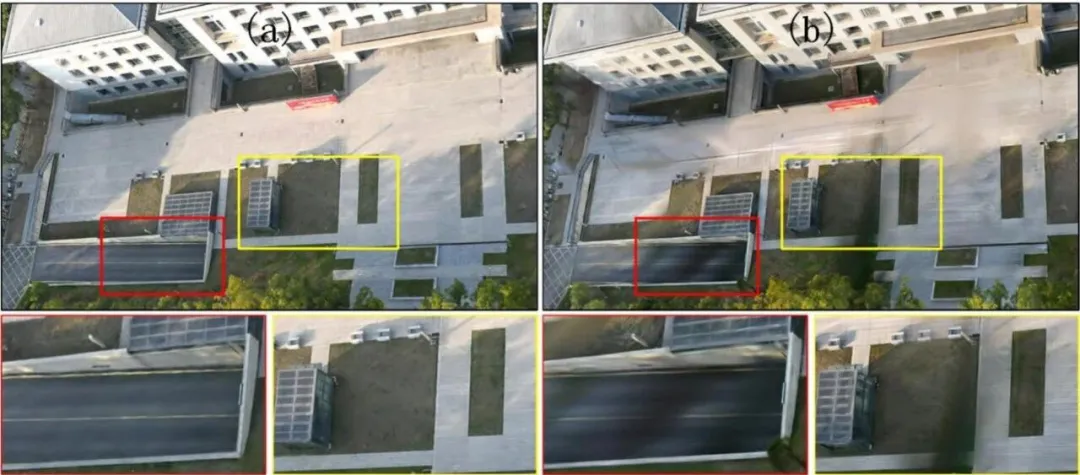
首先,构建了一种多尺度频率–空间联合正则化机制,用于补偿高频信息损失,并通过空间梯度增强与边缘保持约束保证局部几何结构完整性,从而克服传统像素级损失在细节表征方面的不足。其次,设计了高频感知尺度正则化与自适应损失加权机制,以限制高频区域中高斯基元的过度扩张,并优先优化微小几何结构,从而增强复杂场景中的细节恢复能力。最后,提出了一种融合多维不确定性的增强深度几何一致性约束方法。该方法通过深度梯度突变与法向一致性差异对不确定性进行量化,动态调整多视角约束强度,从而提高低纹理区域及边缘区域中的约束鲁棒性。此外,本文构建并发布了武汉大学无人机数据集(Wuhan University UAV Dataset, WHU_Dataset),涵盖8类典型场景。实验结果表明,在 ISPRS 基准数据集及自建 WHU_Dataset 上,相较于基线3DGS方法,HiDeGS 在峰值信噪比(Peak Signal-to-Noise Ratio, PSNR)上分别提升1.34 dB 和1.95 dB,在结构相似性指数(Structural Similarity Index, SSIM)上分别提升0.085 和0.10。
该方法能够准确恢复建筑轮廓、道路标线等精细几何结构,有效抑制伪影与几何漂移现象,显著提升无人机场景下三维重建的几何精度。本研究源码已开源:https://github.com/SongJiang-WHU/HiDeGS


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
