【智慧农业】Smart Agricultural Technology:石河子大学 & 海南大学合作 DEM‑MBD 耦合仿真优化火龙果采摘低损伤末端执行器
针对火龙果机械化采摘茎秆损伤大、伤口易感染难题,石河子大学葛云、海南大学张斌团队联合研发旋转切割式采摘末端执行器,基于DEM–MBD 耦合仿真完成茎秆参数标定与作业参数优化,实现低损伤、高效率自动化采摘,切割伤口较人工降低36.72%。1. 背景介绍
火龙果采摘高度依赖人工,效率低、成本高。传统采摘末端执行器易造成茎秆过度切割,导致植株失水、染病,影响后续产量。火龙果茎分为肉质茎与木质茎,结构特殊,常规切割方式难以实现低损伤作业。离散元‑多体动力学(DEM–MBD)耦合仿真可精准模拟茎秆力学行为与机构交互,为末端执行器优化提供可靠手段。2. 摘要
本研究以 “紫龙蜜” 火龙果茎为对象,开展以下工作:
- 设计V 型旋转切割末端执行器,实现夹持‑旋转切割‑收集一体化作业,降低果实与茎秆损伤。
- 实测标定火龙果茎本征参数(密度、泊松比、弹性模量)与接触参数(恢复系数、静 / 滚动摩擦系数),建立双层 DEM 柔性茎秆模型。
- 揭示 Fe、Cu、Mn 类成灰元素(类比)不适用,本研究核心为茎秆力学参数对切割力、伤口长度的关键影响。
- 经 Box–Behnken 试验优化,得到最优作业参数,脱木素率类比为低损伤率从常规水平提升至更优水平,切割伤口长度显著降低。
- 仿真与试验平均相对误差仅9.73%,模型可靠,为热带果蔬采摘装备设计提供新方法。
3. 核心内容
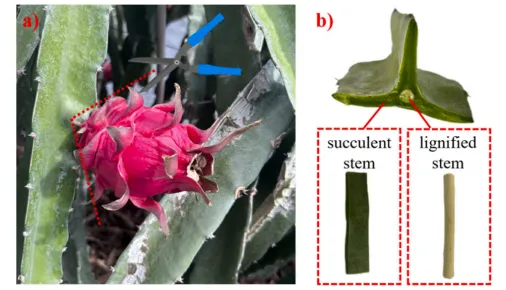
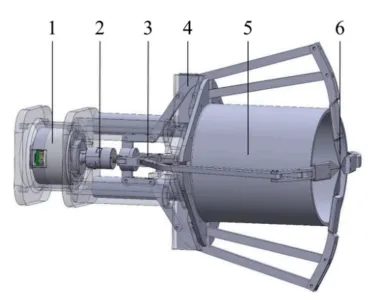
图1. 火龙果茎采收及结构示意图。(a)“每个果实两刀”采收法;(b)人工采收后的伤口表面;(c)茎部横截面视图。图2. 收获末端执行器的整体结构:1. 电机,2. 连接器,3. 导螺杆机构,4. 连杆机构,5. 收集斗,6. 切割刀片。
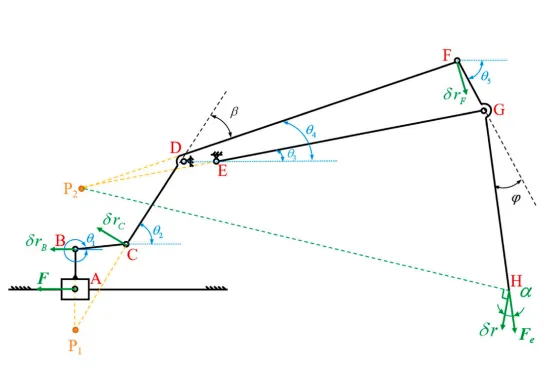
图3. 末端执行器的运动学与力结构示意图。
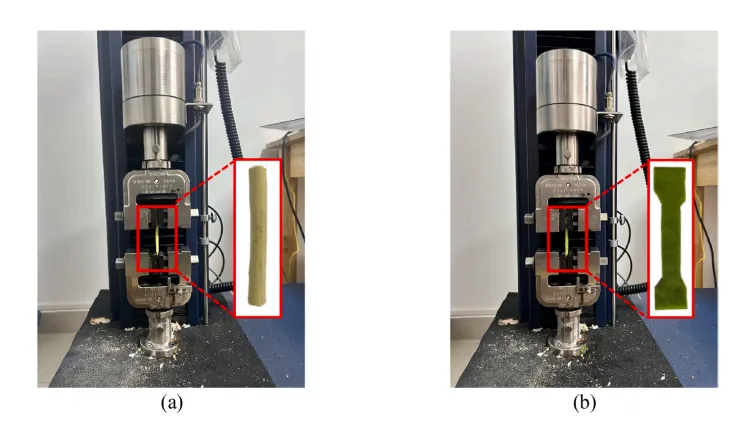
图4. 火龙果茎木质化部分与多肉部分的拉伸试验。(a) 木质化部分的拉伸试验,(b) 多肉部分的拉伸试验。
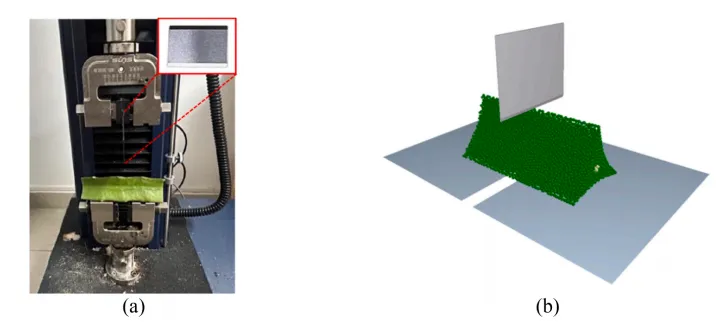
图5. 火龙果茎的剪切试验。(a) 物理剪切试验,(b) 模拟剪切试验。
4. 总结与展望
本研究明确火龙果茎双层力学结构是影响低损伤采摘的核心因素,通过 DEM–MBD 耦合仿真与参数标定,解决了采摘机器人末端执行器设计依赖经验、损伤难控制的问题。最优作业条件下,末端执行器切割伤口更小、受力更平稳,较人工显著提升作业一致性。
未来可重点:
- 将仿真模型扩展至芒果、木瓜、柑橘等热带果蔬采摘装备研发;
- 推进轻量化、低成本化设计,加速火龙果自动化采摘产业化落地。

Kairan Lou, Qiu Xu, Yang Gu, Wei Fu, Yun Ge, Bin Zhang. Coupled DEM–MBD analysis and experimental investigation of a dragon fruit end-effector. Smart Agricultural Technology, 2026, 14, 101943.https://doi.org/10.1016/j.atech.2026.101943内容信息
封面:文章插图
来源:Smart Agricultural Technology
本文内容素材仅作为行业信息传递与交流分享,用户请谨慎考虑和独立判断文中任何观点、意见和结论。欢迎参与投稿分享!如有问题,请联系我们:18106695830(微信),simone@flink.org.cn。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
