产品概述
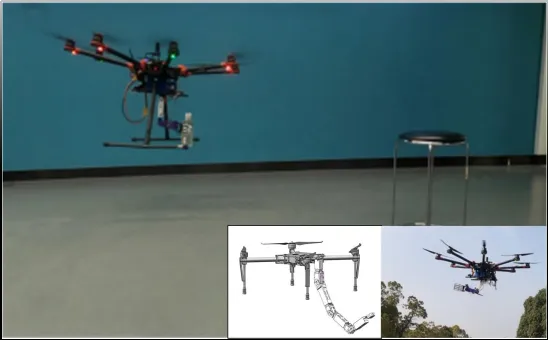
面向精准农业的飞行操作机器人平台,是在多旋翼无人机上集成轻量化机械臂与末端喷洒模块所构建的小型空中作业平台,主要面向果园、树木类作物、高位作物及局部目标区域的定向喷洒实验与教学应用。平台重点解决传统无人机主要向下喷淋、喷洒角度单一、难以兼顾侧向和局部精细喷洒的问题,通过机械臂末端姿态调节和喷洒流量控制,实现喷头方向调整、喷水角度调节以及水量控制。
平台配备飞行控制器、机载计算单元、双目视觉传感器和 3D 激光雷达等机载硬件,能够完成飞行控制、环境感知、基础定位与近距离避障等功能,适用于树木环境下的近距离喷洒作业。作业过程中,操作人员可通过遥控器控制无人机飞行状态、机械臂末端姿态和喷洒模块工作参数,实现喷头角度调节及喷水流量调节,从而更灵活地完成面向不同高度、不同角度目标区域的精准喷洒。整体上,本平台以“无人机飞行 + 机械臂调姿 + 末端喷洒”为核心,适用于课程教学、实验演示和基础科研验证,具有较好的可实现性和场景针对性。
二、功能与特点
(1)飞行平台与机载感知系统一体化
平台集成飞控、机载上位机、双目视觉和3D激光雷达等硬件设备,具备稳定飞行控制、环境感知、基础定位和近距离避障能力,可满足树木、枝叶等复杂农业环境下的近距离作业需求。
(2)机械臂末端定向喷洒
平台在无人机机体下方安装轻量化多自由度机械臂,并在机械臂末端集成喷头。通过机械臂关节运动可调节喷头的俯仰、侧向和斜向姿态,使平台不仅能够进行传统下向喷淋,还可对树冠侧面、枝叶背面、果实周边及高位目标区域进行定向喷洒。
(3)支持喷洒角度与流量调节
平台支持对喷头方向和喷水流量进行调节。喷洒角度主要通过机械臂末端姿态调整实现,可根据目标位置灵活改变喷头朝向;喷水流量可通过喷洒模块进行控制,以适应不同距离、不同目标区域和不同喷洒强度下的作业需求。
(4)适用于悬停与低速近距离作业
平台可在悬停状态下开展定点喷洒,也可在低速飞行过程中进行局部喷洒,适合对单株、单枝、局部病虫害区域或特定目标点开展精细处理,更适用于果园和树木环境下的近距离喷洒实验。
(5)近树冠环境下的辅助定位与避障
平台配备双目视觉与3D激光雷达,可对周围环境进行感知,为树木环境下的基础定位和近距离避障提供支持,帮助平台在接近树冠、枝条及障碍物时保持更安全、更稳定的作业状态。
(6)适合教学演示与基础科研验证
平台结构清晰、功能直观,可用于展示无人机、机械臂与喷洒模块之间的协同关系,适合开展精准农业装备、飞行机器人、机电系统集成和末端执行器控制等方向的教学与实验。
三、核心硬件参数
1) 整机参数
2) 飞行控制器
处理器:STM32H753,主频 480MHz,内存 2M
传感器:双工业级 IMU 冗余设计(IIM-42652/BMI088),电子罗盘 IST8310,气压计 ICP-20100/BMP581
扩展接口:UART×5、I2C×3、PWM×14、CAN×2、网口 ×1
重量:33.8g;尺寸:30.75×25.75×31.8mm
3) 机载电脑核心板
操作系统:Ubuntu 20.04 + ROS Noetic
AI 算力:70TOPS
GPU:1024 核 NVIDIA Ampere 架构,32 个 Tensor Core
CPU:6 核 Arm Cortex-A78AE 64 位,1.5MB L2+4MB L3
显存:8GB 128 位 LPDDR5,带宽 102.4GB/s
功耗:10–20W;尺寸:69.6×45mm
4) 机载电脑扩展板
5) 激光雷达
6) 双目相机
7) 机械臂参数
重量:704g
伸长臂展:414mm
自由度:5 自由度
3 个 pitch 自由度
1 个 roll 自由度
1 个 yaw 自由度
8) 末端喷洒模块参考参数
四、核心实验体系
本平台围绕“飞行控制—机械臂调姿—末端喷洒”构建实验体系,重点面向基础功能验证和系统集成实验。
(1)机械臂挂载飞行实验
验证无人机在挂载机械臂后的起飞、悬停、低速飞行和降落能力,观察机械臂对整机重心和飞行稳定性的影响。
(2)机械臂末端姿态调节实验
通过遥控器控制机械臂关节运动,实现喷头俯仰、侧向和斜向调整,验证末端喷头姿态可调能力。
(3)喷洒角度与流量调节实验
通过控制喷头朝向和喷水流量,比较不同喷洒角度、不同喷量条件下的喷洒范围和效果,验证平台对局部目标区域的喷洒适应能力。
(4)悬停定点喷洒实验
在无人机悬停状态下,通过机械臂调整喷头方向,对指定区域进行定点喷洒,验证平台的局部作业能力。
(5)树木环境近距离喷洒实验
在树木或模拟树冠环境中,利用双目视觉和激光雷达进行环境感知、基础定位和近距离避障辅助,完成靠近目标区域的喷洒实验。
(6)平台综合演示实验
综合展示无人机飞行、机械臂调姿、喷头控制以及树木环境近距离作业流程,体现平台整体集成效果。
五、支撑专业核心课程
本平台可支撑以下课程的实验教学与课程设计:
自动控制原理
机器人学基础
无人机原理与应用
机电一体化系统设计
传感器技术与应用
机器人操作系统(ROS)
农业机器人技术
智能农业装备基础
六、典型应用场景
(1)精准农业喷洒教学实验
面向果园、树木类作物和特色经济作物,开展局部、定向、小范围喷洒实验与教学演示。
(2)树木及高位作物喷洒验证
平台可通过机械臂调节喷头姿态,对树木侧面、枝叶背面、果实周边及高位目标区域进行侧向、斜向和定向喷洒,并可根据需要对喷洒角度和喷水流量进行调节,更适合复杂立体作物环境下的精细作业验证。
(3)农业机器人系统集成实验
用于开展无人机平台、机械臂、喷洒模块及传感器系统的协同集成实验。
(4)果园近距离作业辅助研究
利用双目视觉和激光雷达在树木环境下进行环境感知、基础定位和避障辅助,为近距离喷洒作业提供安全支撑。
(5)多学科交叉教学与实践
支撑农业工程、自动化、机器人、人工智能及飞行器相关专业的综合实践与毕业设计。
七、未来应用场景
在完成基础喷洒平台验证后,后续可结合实际需求逐步拓展到以下方向:
(1)果树冠层侧向精准喷洒
面向柑橘、苹果、梨树、桃树等果树作物,对传统下喷方式不易覆盖的树冠侧面和枝叶背面开展更有针对性的喷洒作业。
(2)高位作物局部喷施
面向树木、高位果实和高秆经济作物,对局部病虫害区域、高处叶片及重点目标部位实施定向喷洒。
(3)温室与立体种植环境喷洒
在温室、棚架种植和立体农业环境中,对不同高度、不同朝向的作物区域开展更加灵活的局部喷施。
(4)轻量化农业末端模块扩展
在喷洒模块基础上,可进一步扩展轻量化检测、接触探测或其他小型农业作业模块,提升平台的应用灵活性
八、产品优势
(1)作业方式灵活:相较固定下喷方式,更适合树木侧面、高位区域和局部目标喷洒;
(2)末端可调能力强:支持喷头角度调节和喷水流量调节,满足不同目标区域喷洒需求;
(3)环境适应性较好:具备树木环境下的基础定位、环境感知和近距离避障能力;
(4)系统结构清晰:飞行平台、机械臂和喷洒模块分工明确,便于教学演示和实验开展;
(5)具备一定扩展空间:后续可继续扩展更多轻量化农业作业功能。

 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
