2026年第7期论文已上线,点击关注不迷路!
《农业工程学报》2026年第42卷第2期刊载了南京农业大学等单位施印炎、徐浪涛、汪小旵、黄薛凯、王磊、郑恩来、王博炜、袁明华与沈成的论文——“割台前置式果园除草机器人设计与试验”。该研究由国家重点研发计划项目(项目号:2023YFD2000305-04;2023YFD2000304)等资助。
引文信息:施印炎,徐浪涛,汪小旵,等. 割台前置式果园除草机器人设计与试验[J]. 农业工程学报,2026,42(2):81-93.
DOI: 10.11975/j.issn.1002-6819.202503133
研究目的与方法:
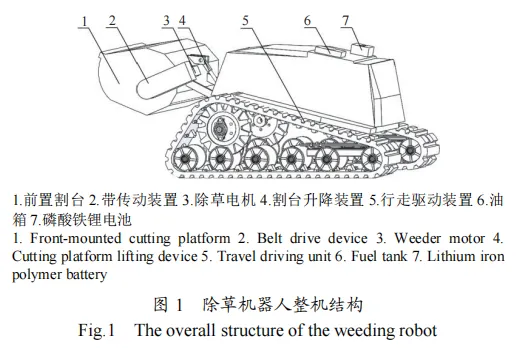
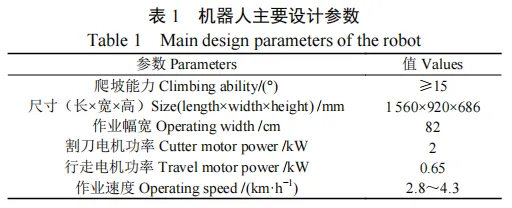
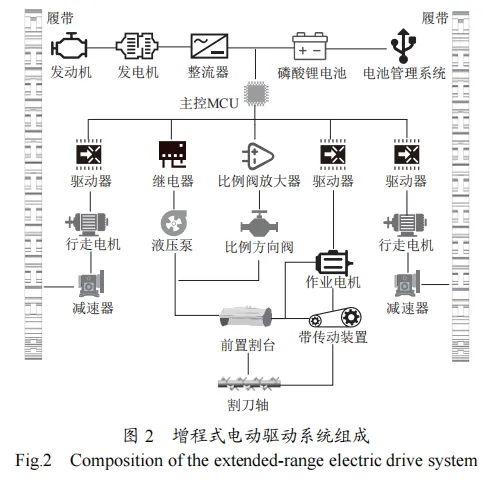
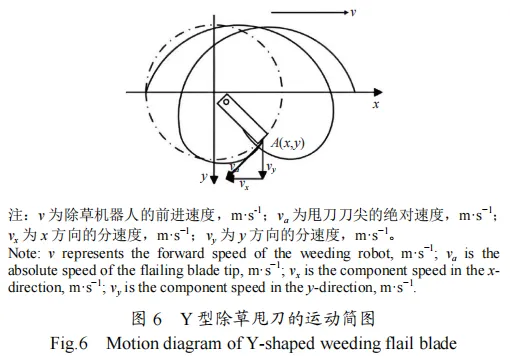
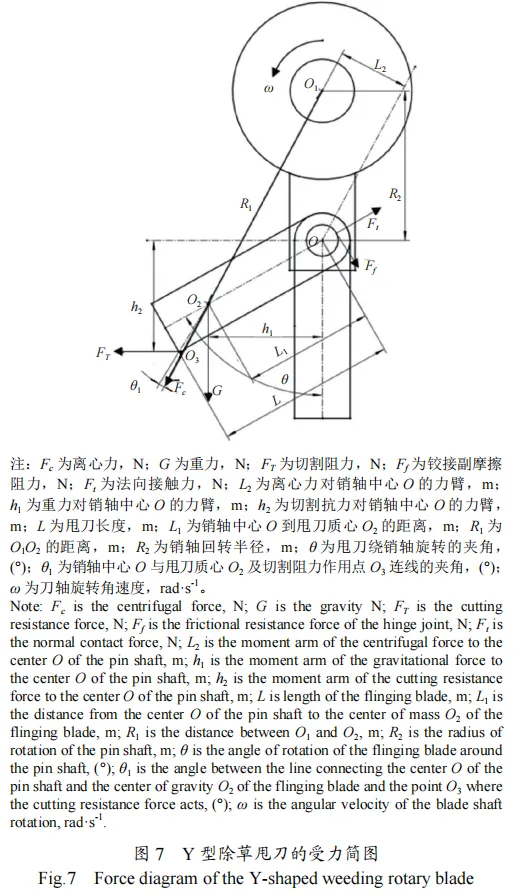
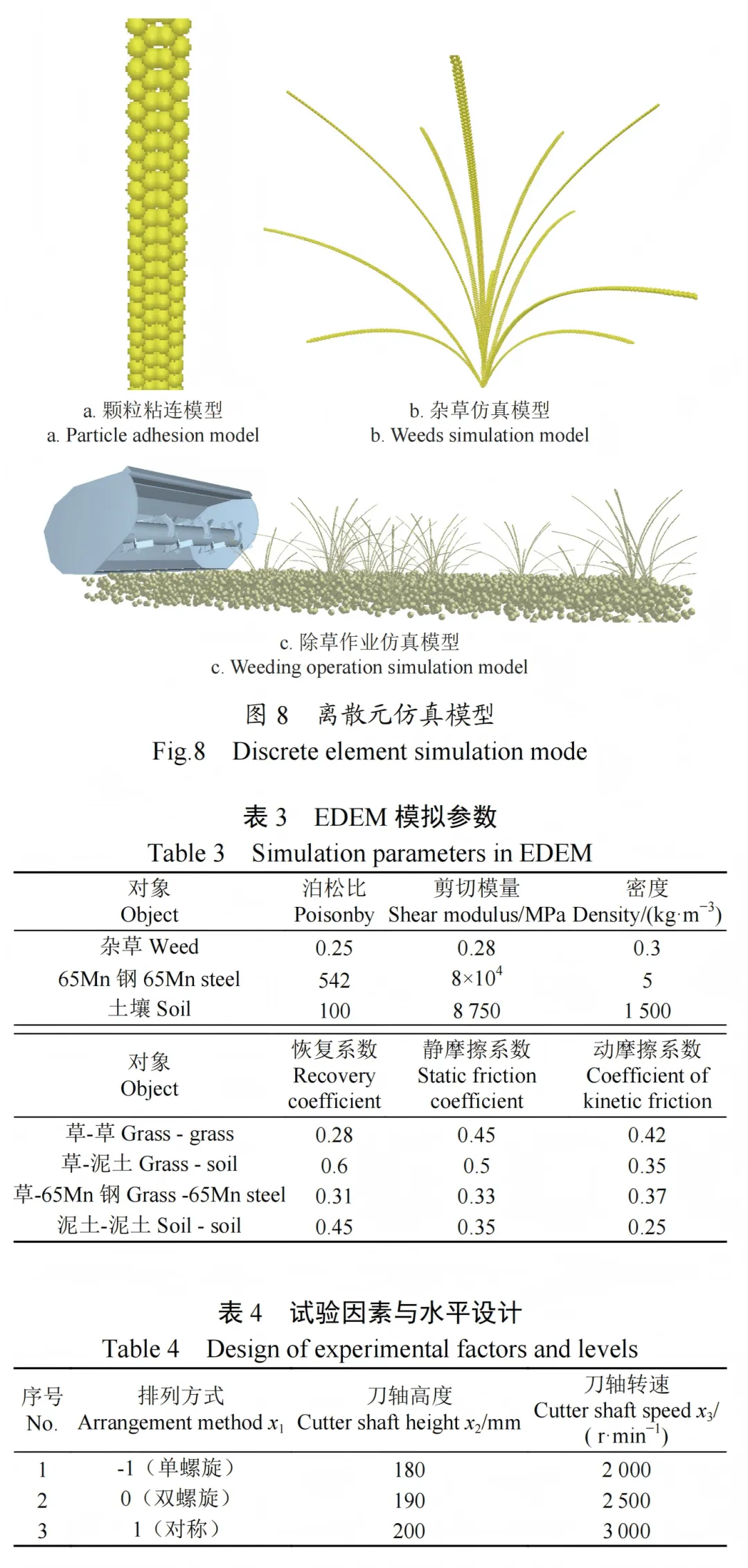
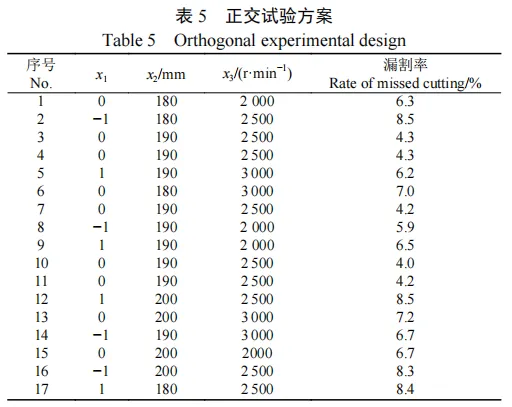
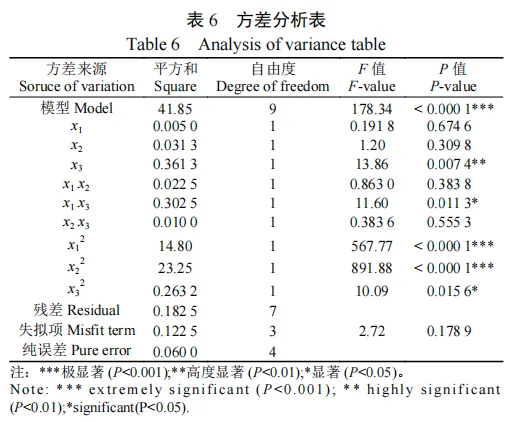
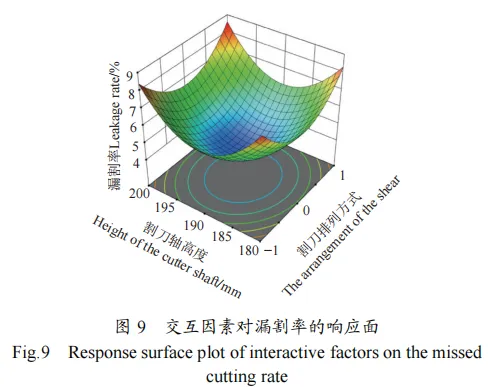
针对果园化学除草破坏土壤生态系统、影响果树健康与果品质量,长期使用易使杂草产生抗药性,严重制约果园可持续发展的问题,该研究提出一种适用于果园机械除草的割台前置式果园除草机器人。结合果园作业环境与割草作业要求,设计了增程式混合动力驱动系统、履带行走系统、除草电机过载保护系统等。通过运动学和动力学分析,对割刀参数进行优化以提升作业效率与稳定性。利用虚拟样机技术与 EDEM 离散元法,构建基于Bonding V2粘结颗粒模型的杂草、土壤、刀具的多相耦合仿真模型。运用 Design Expert 软件设计了三因素三水平正交试验,结合响应面优化分析,探究不同刀片排列方式、割刀转速及刀轴高度及其交互作用对漏割率的影响,建立漏割率回归模型。
结果与结论:
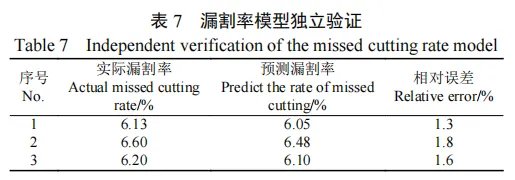
仿真结果显示,当刀片采用双螺旋排列,转速为 2286.246 r/min,割刀轴高度为 189.823 mm时,除草效果最优,预测漏割率仅为 4.154%。
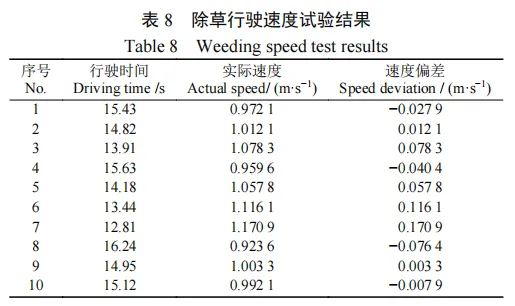
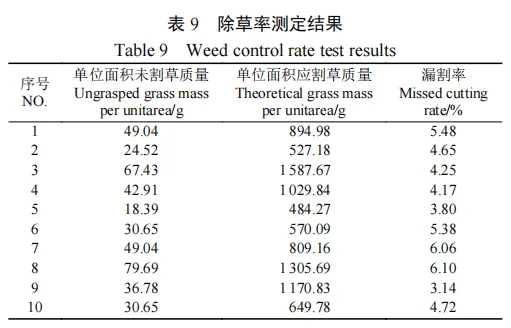
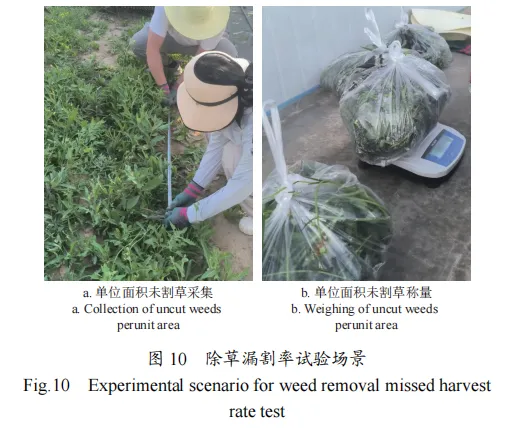
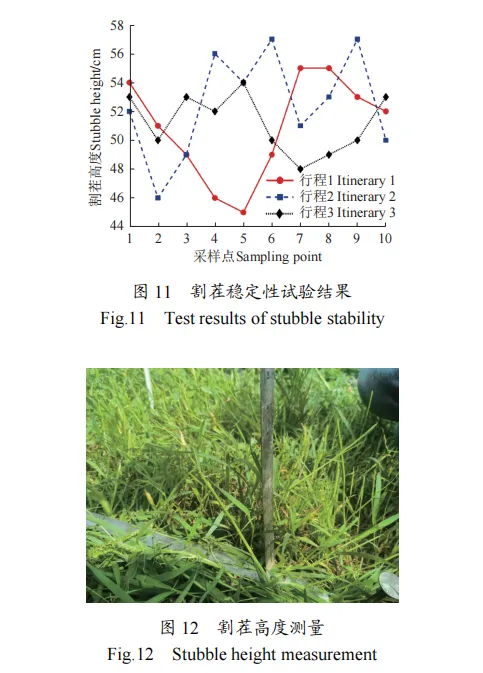
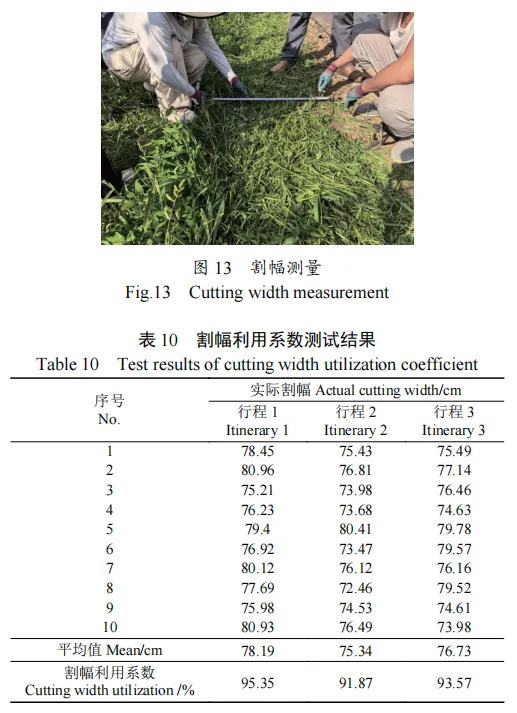
进行田间试验对设计的有效性与仿真优化结果进行验证,在圆整优化参数组合下,机器人实际除草漏割率为 4.77%,与仿真预测值接近;割茬高度稳定性系数大于 90%,割幅利用系数均值高于 90%。
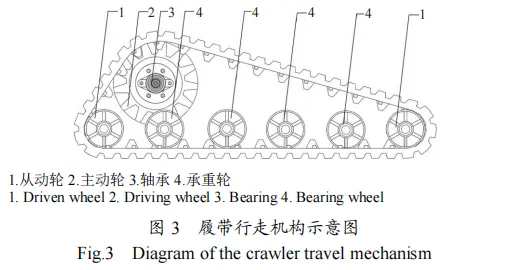
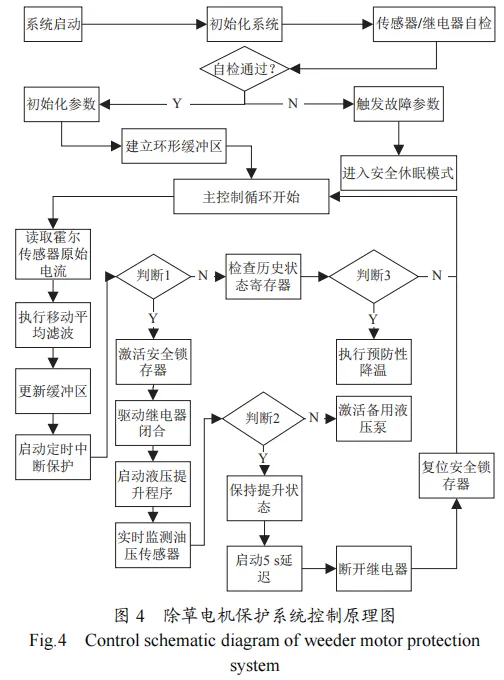
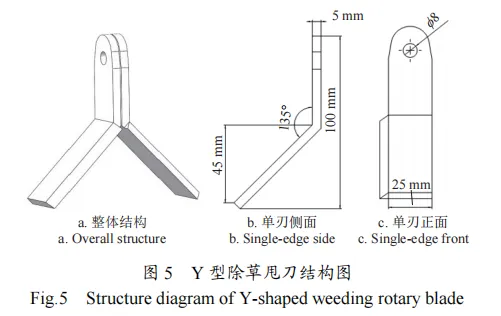
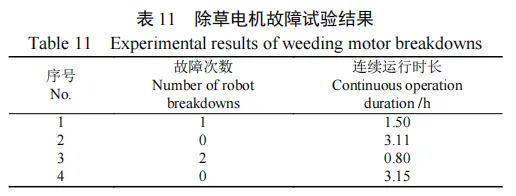
割台前置式果园除草机器人采用Y型甩刀切割方式,对土壤扰动小,能有效保护表层结构;具备除草电机智能过载保护功能,有效降低除草电机因过载发生故障的概率;履带底盘适应复杂地形,增程系统续航能力达8~12 h,在作业性能和除草效率上表现优异,可为解决果园化学除草难题提供高效环保的机械化方案,可为果园除草装备的进一步优化与应用提供理论支撑。
本文由丨《农业工程学报》编辑部丨精编发布
欢迎留言、分享、点赞
转载、投稿、咨询
邮箱:tcsae@tcsae.org
发布征集
欢迎广大作者、读者投稿至我刊公众号,包括但不限于创新科研成果、科技写作技巧、书籍推介、优秀科技工作者介绍、科研团队招聘/招生、行业资讯以及相关活动等农业工程领域信息。
公众号文章投稿邮箱:abe-newmedia@tcsae.org
转载请注明来源、原标题与原文链接:本文转自“农业工程学报(ID:tcsae1985)”微信公众号,原标题:xxxxxx;原文链接:xxxxxxxx。
公众号内回复【关键词】查询/获取更多信息
公众号内回复【2026年征稿】获取本刊2026年度重点专题、优选专题征稿启事
公众号内回复【2025学术年会】回放中国农业工程学会第十届学术年会(CSAE 2025)
公众号内回复【2025审稿人】查看2025年度杰出、优秀审稿人评选结果
收看更多会议讲座回放欢迎关注“农业工程学报视频号”
点击下方“阅读原文”免费获取全文