几年前,田间自主无人作业还像是科幻小说里的桥段;而今天,它已经悄然走进现实。在荷兰,已有约15台AgXeed农业机器人投入使用,更多设备计划在未来几年内上线运行。这不是概念验证,而是商业化试水。问题不再是“会不会来”,而是农业企业和种植户该如何为无人驾驶的未来做好准备?
当前行业的讨论,往往聚焦于“无人驾驶拖拉机”。事实上,真正的变革并不在于有没有驾驶室,而在于:
- 农具是否具备自主监测能力
- 作业是否基于任务地图运行
- 数据是否实现远程管理与闭环控制
换句话说,无人驾驶不是单一设备升级,而是系统化能力的建立。
例如,ISOBUS 技术早已成为主流,农机与拖拉机之间实现标准化通信;而 TIM(拖拉机机具管理系统)则让农具可以“反向控制”拖拉机。像Krone、Kuhn、Kverneland等企业,已将TIM 技术应用于打捆机、割草机等设备。
今天它们的意义是减轻驾驶员负担,明天,它们就是无人作业的基础接口。
一个值得正视的现实是:现代拖拉机在技术上已经“几乎可以完全自主无人运行”。
通过改装系统,例如荷兰GPX Solutions的无人驾驶方案,部分拖拉机已能在园艺和果园场景中实现无人作业。再加装紧急制动装置、安全保险杠和摄像系统,技术闭环基本完成。
但真正的瓶颈在于:
- 欧盟机械安全指令
- 拖拉机类型认证法规
- 责任归属与保险体系
也就是说,技术已经走在法规前面。因此短期内,“监督式无人驾驶”将成为过渡形态,即机器在跑,人仍在场。
不是所有农场都适合立即投资机器人,但所有农场都应该开始“为未来做准备”。
1. 设备采购向“机器人就绪”靠拢
- 优先选择 ISOBUS 接口农具
- 优先选择支持或兼容 TIM 的设备
- 选择 CVT 或全电子控制变速系统的拖拉机
- 选择三点悬挂农具(当前无人系统无法倒车拖曳式农具)
这些选择并不会显著增加成本,却能保留未来升级空间。2️. 建立数据与任务地图能力
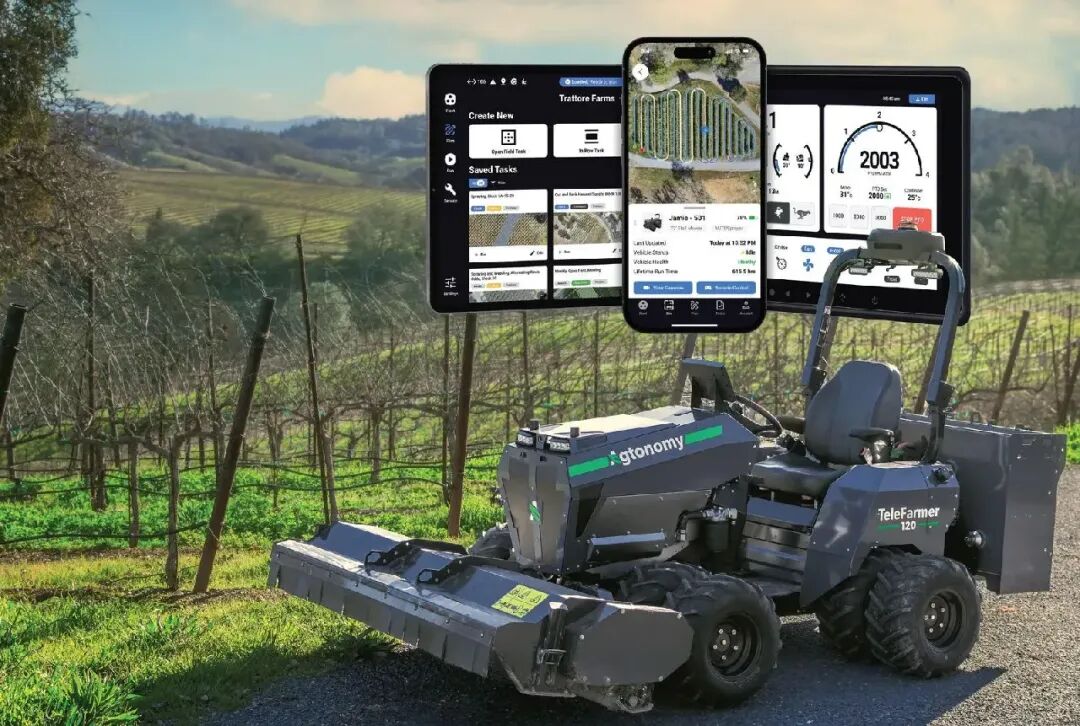
无人驾驶的核心不是方向盘,而是任务地图与远程控制平台。
例如,Kverneland推出的云端管理系统,使ISOBUS 农机具能够进行远程任务管理与监控。这种能力本身就能提升管理效率,即便不实现无人化,也已具备现实价值。
3️. 从“单机思维”转向“系统思维”
传统农业的逻辑是:一台大马力拖拉机 + 一名熟练驾驶员。
无人驾驶时代的逻辑可能是:多台小型机器人 + 夜间作业+ 数据协同。
这意味着设备规模可能更小、作业节奏可能更灵活、资本投入结构可能改变。企业如果仍用“购买一台更大拖拉机”的思维做决策,可能会错过结构性机会。

劳动力短缺确实是重要推动力,但无人驾驶的更深层价值在于:
- 延长作业时间(夜间运行)
- 减少土壤压实(轻量化设备)
- 提高作业一致性
- 精准控制投入成本
在高附加值作物、园艺和精细化管理领域,这种优势尤其明显。完全无人驾驶的农场短期内仍难普及;但“半自主 + 高度自动化 + 远程管理”将快速扩张。
农业无人驾驶不是一场突然到来的革命,而是一条渐进曲线:
- 第一阶段:自动辅助
- 第二阶段:农具智能化
- 第三阶段:监督式无人驾驶
- 第四阶段:完全无人系统
为农业无人驾驶未来做好准备,并不意味着今天就要全面机器人化。真正理性的做法是:
在每一次设备更新中,为未来留下接口。
当技术成熟、法规清晰、市场规模形成时,那些提前布局的人,将拥有更低的转型成本和更高的战略主动权。
无人驾驶的时代或许不会一夜到来,但它已经在地平线上。问题不是“它会不会来”,而是——
当它真正到来时,你是否已经准备好?
温馨提示
长按二维码关注公众号
加入农业食品科技社群

回复“聊”,与城食有农1对1交流
回复“群”,加管理员微信入群
请注明“入群+单位名号+名字”
其他商务合作,请回复“合作”
你若喜欢,随手点个 哦
哦