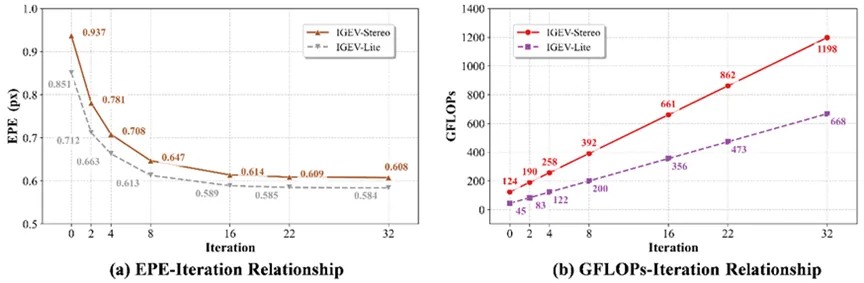
本研究提出并验证了一种融合轻量化立体匹配网络、可变基线双目采集平台与平面参考几何量化方法的道路病害三维感知方案。在统一评测协议下,IGEV-Lite 相较 IGEV-Stereo 将端点误差(EPE)由0.608px 降至0.584px,视差离群率D1由3.24%降至2.97%,同时参数量减少约 25%,计算量(GFLOPs)降低约 44%。在工程部署配置下,单帧推理延迟由135ms 降至97ms,经部署级加速后可进一步降低至88ms。在基线长度B=240mm条件下,病害几何量化实验中最大深度的平均相对误差约为2.7%,积分体积的平均相对误差约为0.9%。真实道路在线测试表明,系统端到端处理延迟稳定在36–42ms范围内,能够在实际巡检场景中实现路面病害的实时三维重建与几何量化。
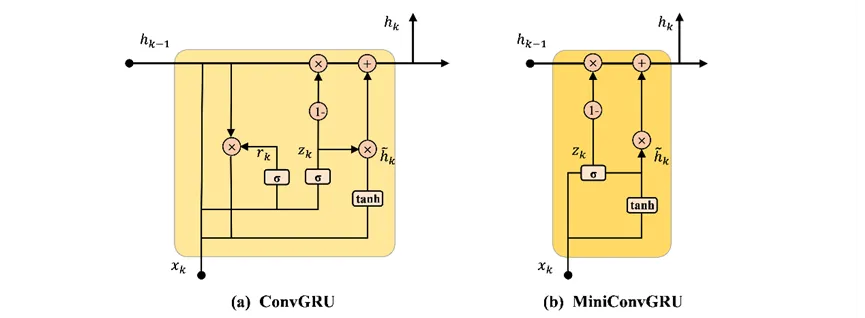
图3 视差更新单元结构对比图:(a) ConvGRU;(b) MiniConvGRU
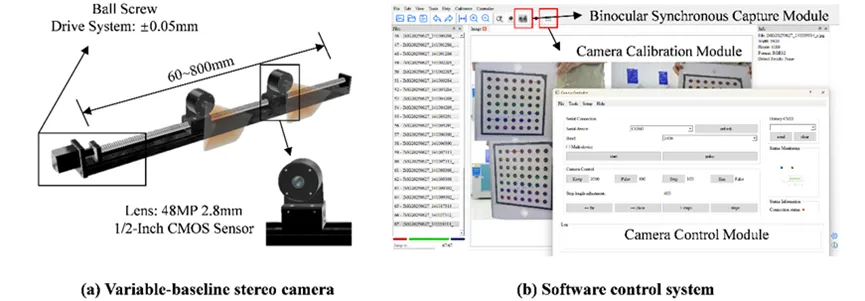
图4 可变基线双目立体采集平台(硬件结构与软件控制系统)
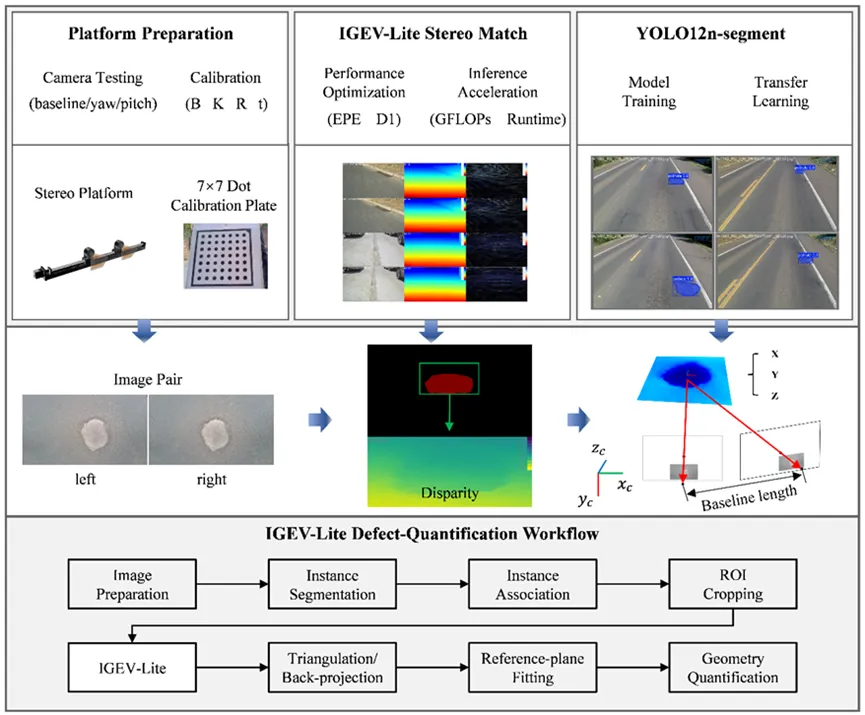
图5 基于 ROI 引导的立体匹配与双目三维重建流程
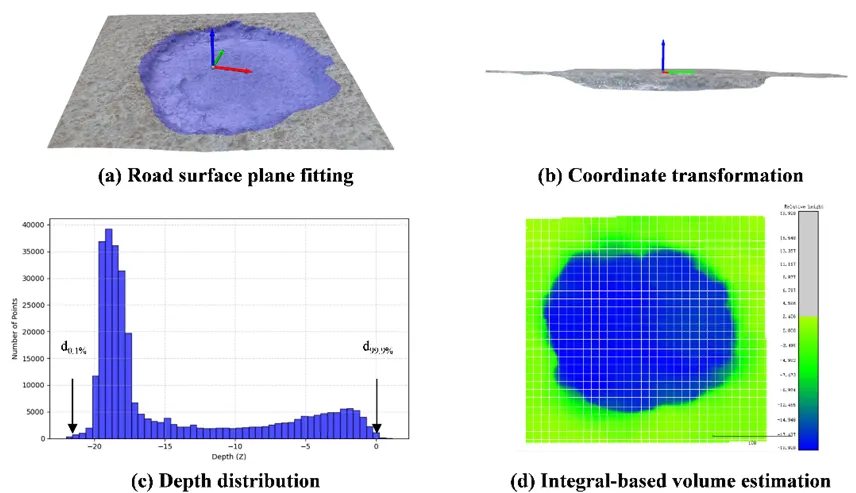
图6 几何参数量化方法与流程(平面拟合、坐标变换与体积积分)
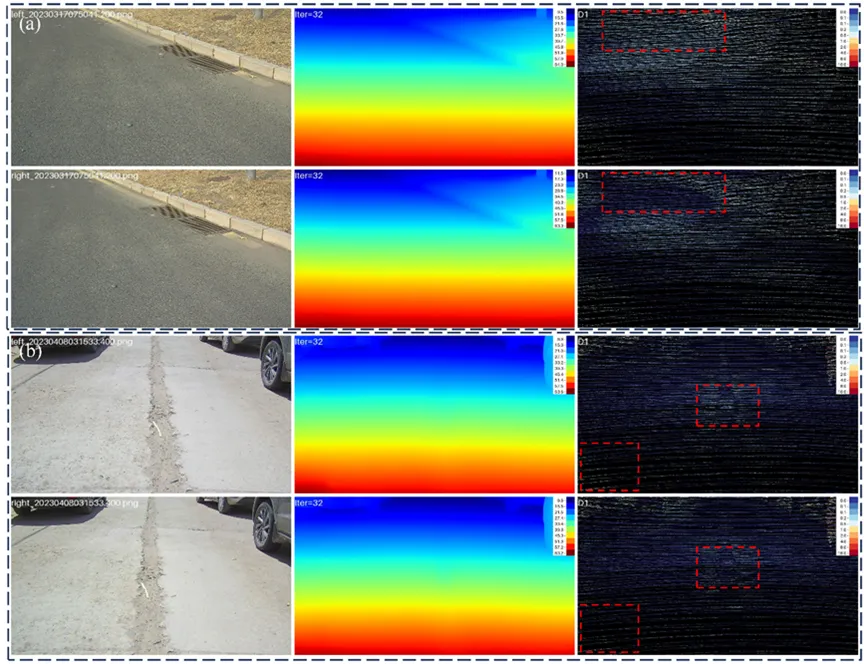
图8 IGEV-Stereo 与 IGEV-Lite 在不同路面类型上的视差结果对比图
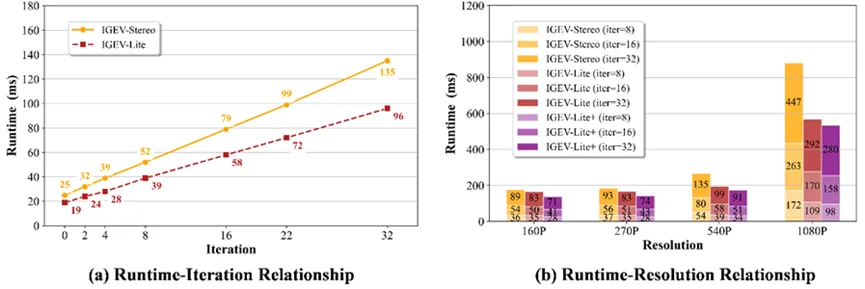
图9 迭代次数消融分析:端点误差与计算量随迭代次数变化关系
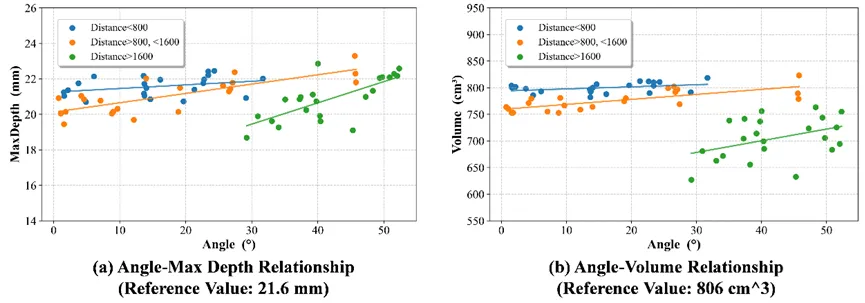
图11 不同拍摄距离条件下最大深度与体积的量化结果
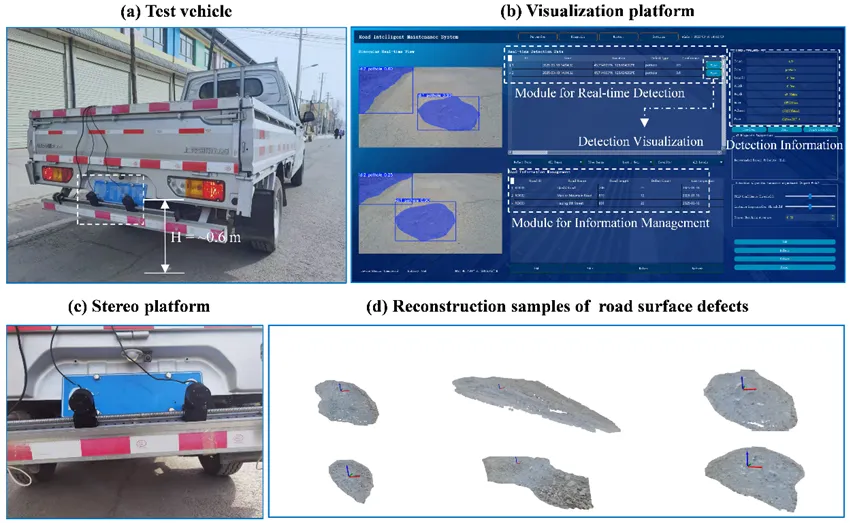
图12 真实道路巡检场景下的系统部署与路面病害三维重建示例图