利用遥感数据同时准确预测作物产量和氮素(N)状态仍然面临较大挑战,其主要原因在于累积性性状(如产量)与生理性性状(如氮素状态)在冠层尺度上的表达机制存在本质差异。为解决这一问题,本研究基于深度学习构建了一种多任务学习(Multi-Task Learning, MT)框架,利用无人机(UAV)获取的多光谱(Multispectral, MS)与激光雷达(LiDAR)融合数据,在马铃薯垄间封行期(row closure)实现块茎产量与叶柄硝态氮含量(Petiole Nitrate-N, PNN)的联合预测。研究数据来源于连续两个生长季的田间试验。通过多种神经网络架构,系统比较了多任务学习(MT)与单任务学习(Single-Task Learning, ST)在独立测试集上的预测性能差异。
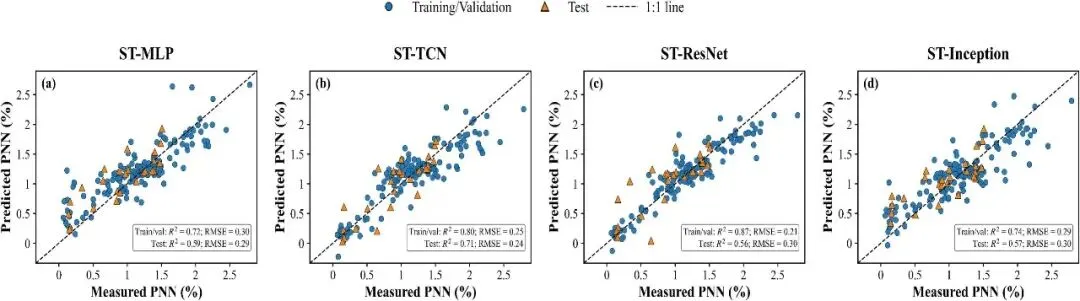
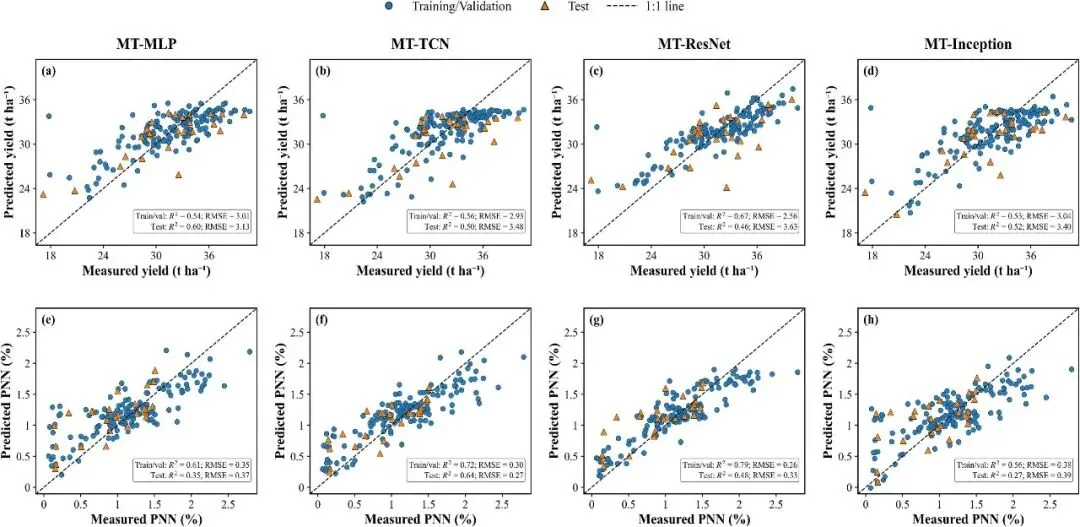
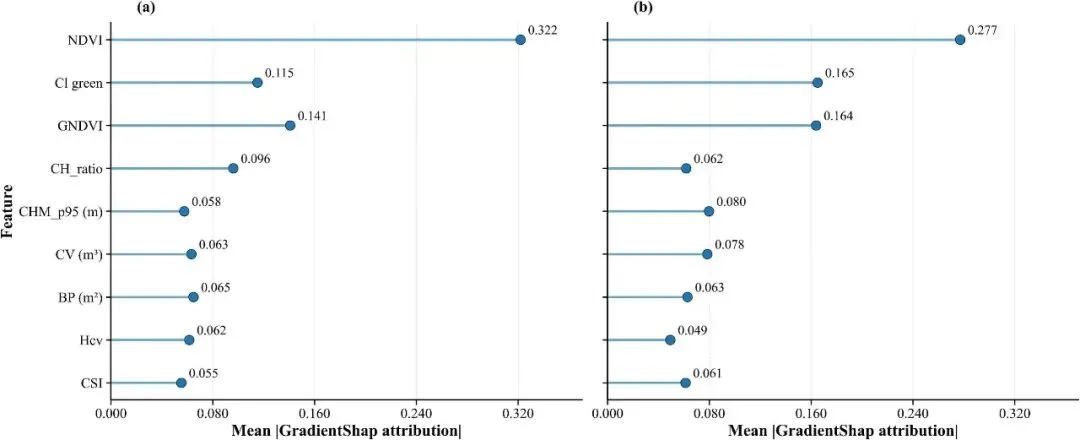
结果表明,与仅针对产量进行预测的单任务模型相比,多任务联合优化显著提升了马铃薯产量预测精度。在单任务学习条件下,测试集决定系数(R²)最高不超过0.26;而采用多任务学习后,不同网络架构下的产量预测 R² 提升至0.46–0.60。相比之下,多任务学习对叶柄硝态氮含量(PNN)的预测提升较为有限,且效果受网络结构影响较大。特征贡献分析结果表明,产量预测依赖于光谱信息与三维冠层结构信息的综合作用。其中,基于 LiDAR 提取的植株高度、冠层体积以及结构异质性等参数均表现出稳定贡献,但其相对重要性低于光谱植被指数。而在 PNN 预测中,叶绿素敏感型光谱指数占据主导地位,这与氮素状态作为短期生理指标的特征相一致。研究结果表明,在马铃薯生产体系中,共享学习框架(shared-learning framework)的有效性取决于遥感输入信息与目标性状生理时间尺度之间的匹配程度。对于产量等累积性状,多任务学习能够充分挖掘结构与光谱信息的协同作用,从而显著提升预测性能;而对于氮素状态等瞬时生理性状,其潜在优势则相对有限。
本研究为利用无人机多源遥感数据实现作物产量与营养状态的协同监测提供了新的技术思路,也为精准农业中的多任务智能预测模型构建提供了理论依据。
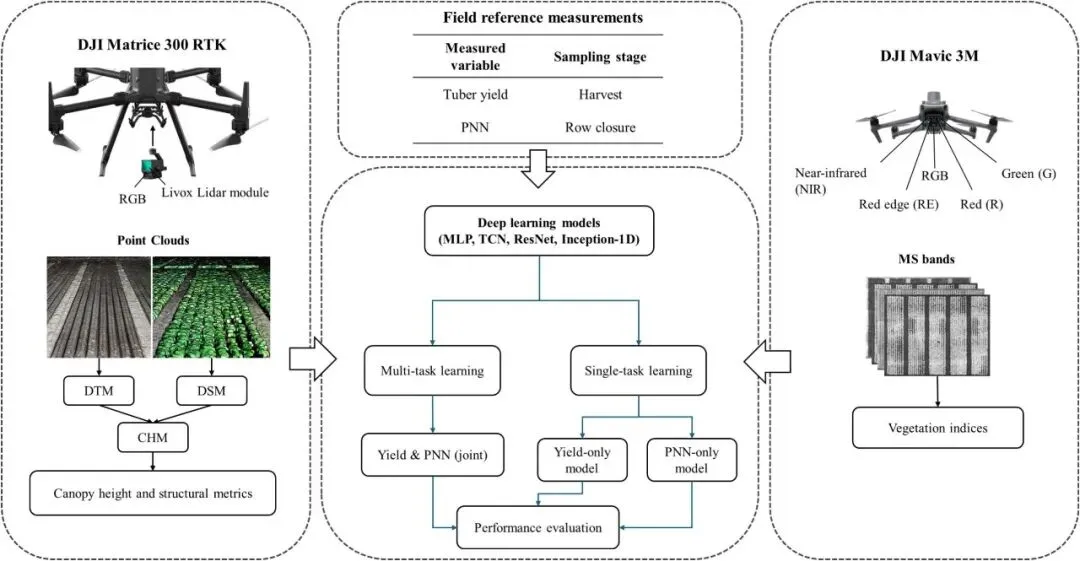
图1. 多传感器数据采集、特征提取及基于深度学习(DL)的建模集成工作流概述
图3. 比较单任务(ST)深度学习模型(包括ST-MLP(a)、ST-TCN(b)、ST-ResNet(c)和ST-Inception(d))中实测与预测PNN(%)的一致性图
图4. 通过多任务(MT)深度学习模型(包括MT-MLP、MT-TCN、MT-ResNet和MT-Inception)获得的马铃薯块茎产量(t ha⁻¹;a–d)和叶柄硝酸盐氮(PNN,%;e–h)的实测值与预测值对比图
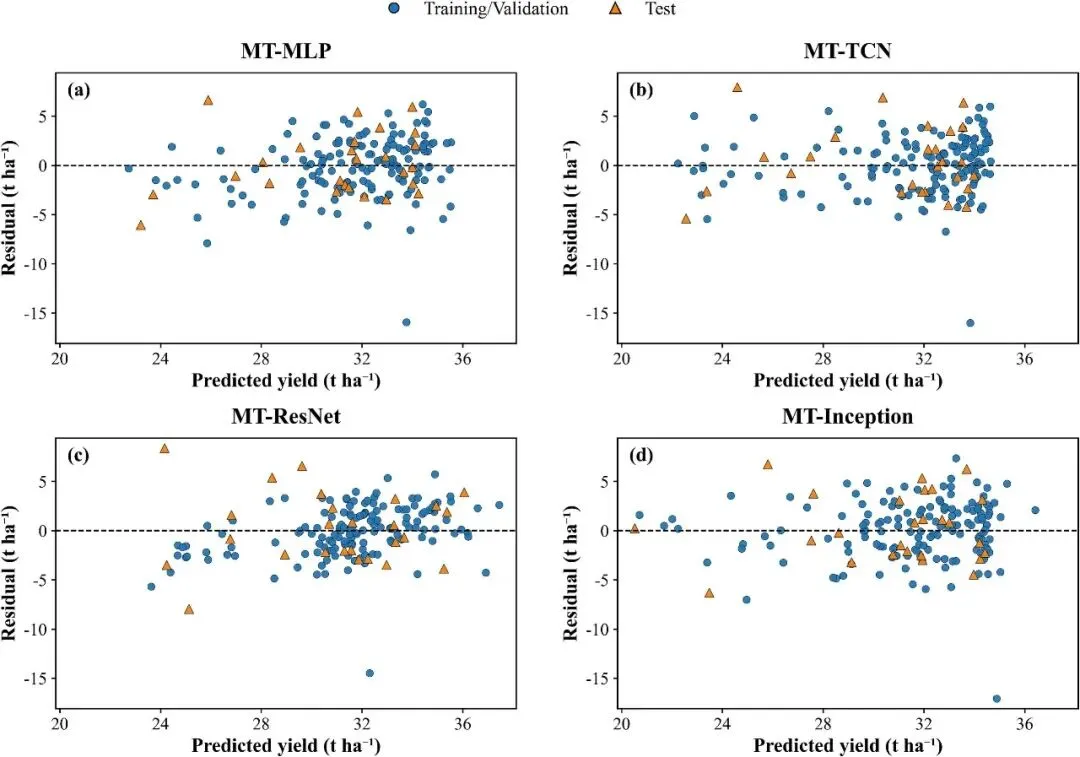
图5. 多任务(MT)深度学习模型(包括MT-MLP、MT-TCN、MT-ResNet和MT-Inception)对块茎产量预测的残差图
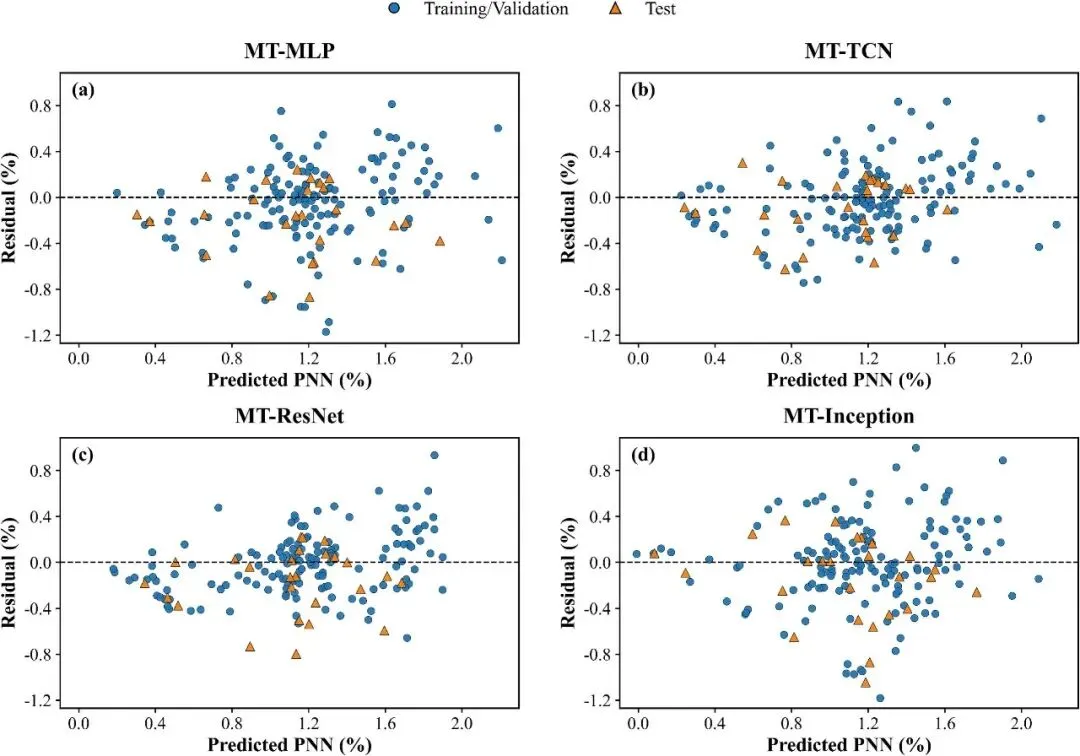
图6. 多任务(MT)深度学习模型(包括MT-MLP、MT-TCN、MT-ResNet和MT-Inception)对叶柄硝酸盐氮(PNN)预测的残差图
图7. 马铃薯块茎产量(a)和叶柄硝酸盐氮(PNN)(b)机器学习预测中GradientShap特征的重要性
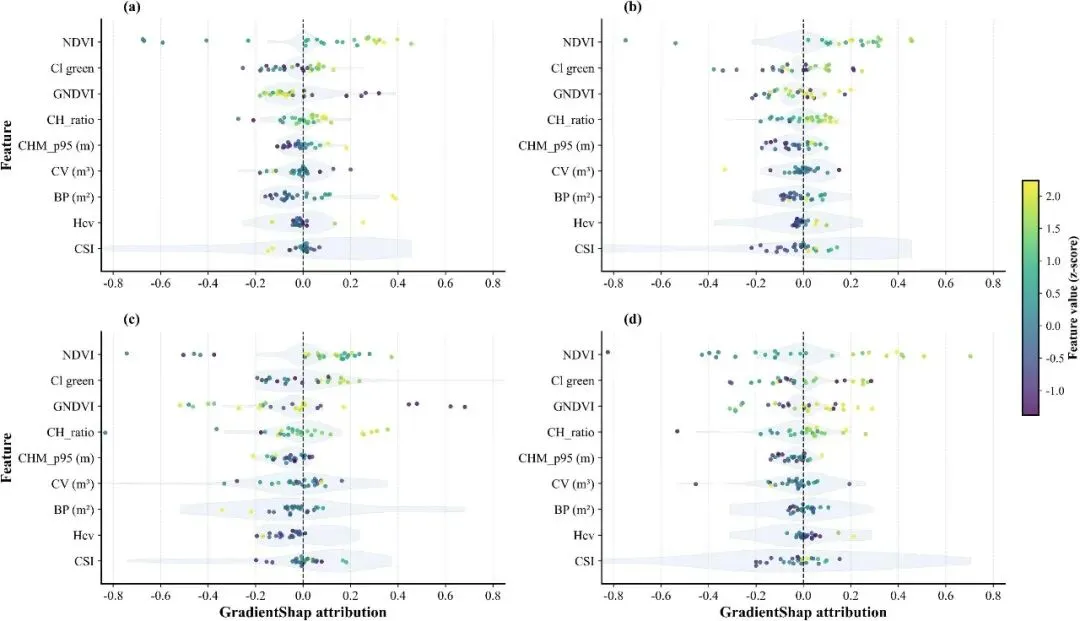
图8. 四种架构(MT-MLP(a)、MT-TCN(b)、MT-ResNet(c)和MT-Inception(d))在马铃薯块茎产量(t ha⁻¹)多任务(MT)预测中的Beeswarm GradientShap归因图
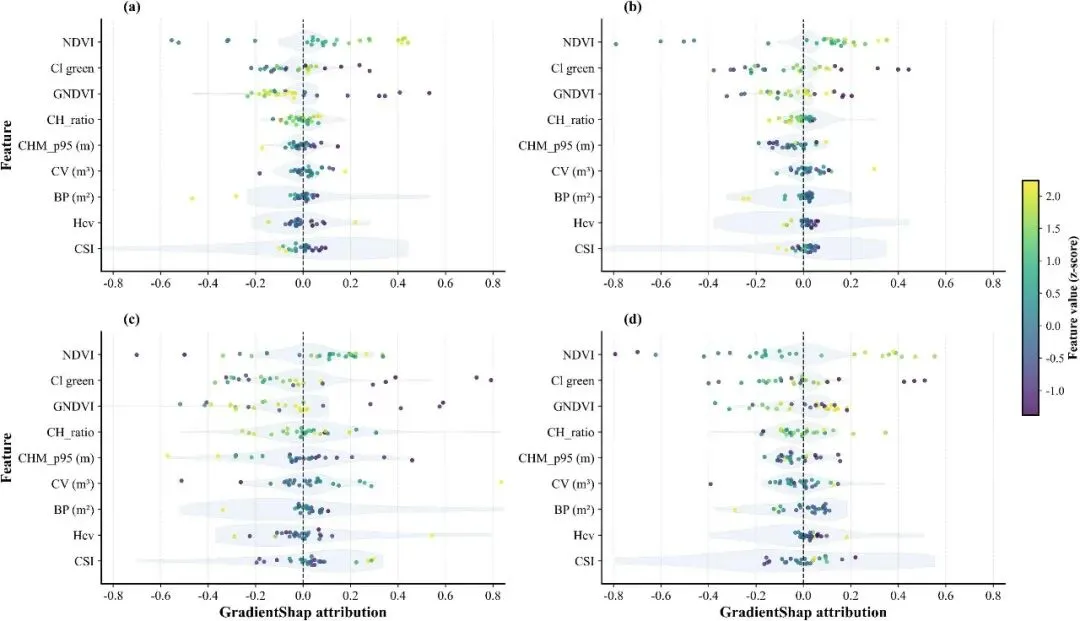
图9. 针对图8中所示的同一组四种架构,Beeswarm GradientShap对叶柄硝酸盐氮(PNN,%)的多任务(MT)预测结果的归因分析
来源:
Ehsan Chatraei Azizabadi, Nasem Badreldin, Joint prediction of potato yield and nitrogen status at row closure using multi-task deep learning and UAV-derived LiDAR–multispectral data, Computers and Electronics in Agriculture, 10.1016/j.compag.2026.111893
本文源自:扬州大学智慧农业研究院


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
