农业机器人的前沿技术汇总
- 2026-06-01 15:44:15

图片由AI创作
本文清研智慧农业原创整理
清研智慧农业源于清华装备院智能系统与大数据分析研究中心
“专注农业自动化非标定制研发”

本期文章,我们借助AI查找总结了近几年一些农业机器人前沿研究,也对照了一些公司案例。科研,不等于成熟产品,也不代表马上能够商业化,但能让我们看见一个方向:农业机器人正在从“看见目标”,走向“理解任务、稳定执行、连续作业”。
下面这10个方向,不是并列的技术名词,而是一条完整链条。它们串起了农业机器人从感知、移动、执行、决策到产业落地的关键环节。
我们更关心的是:这些技术到底在攻什么难题,文献和公司走到了哪一步,真正落地还卡在哪里。
另外,本文在结构上借鉴了FieldStar的《智慧农业前沿热门方向汇总》,这里也推荐大家阅读原文。
01
多模态感知
机器人先要看懂农业现场
农业机器人第一个难题,不是动手,而是看懂。
农田、果园、温室和养殖场都不是标准工厂。果实会被叶片遮挡,杂草会和幼苗混在一起,光照会从清晨变到傍晚,水汽、泥土、反光、阴影都会影响识别。对机器人来说,农业现场没有标准答案。
这也是为什么,前沿研究已经不满足于单一图像识别,而是转向多模态感知。普通图像、深度相机、近红外、高光谱、激光雷达、触觉传感,都在被尝试引入农业机器人。
2025年一篇关于智能水果采摘机器人视觉感知的综述提到,深度学习、三维重建和图像分割正在提高机器人感知能力,但果实遮挡、复杂光照和真实环境鲁棒性仍然是核心挑战。
公司层面,Carbon Robotics 的激光除草设备把计算机视觉、深度学习、机器人和激光结合起来,用于区分作物和杂草;Ecorobotix 的精准喷施设备则通过实时识别,把喷药从“整片喷”推向“植物级处理”。
但这里真正的产业问题不是“识别率能不能再高一点”。
真正的问题是:检测之后怎么办。
除草机器人识别出杂草以后,要决定刀具、喷头或激光怎么作用;采摘机器人识别出果实以后,要判断从哪里接近、会不会碰伤、采完放到哪里。感知技术只有进入“判断—执行”闭环,才真正有产业价值。
关键词
多模态感知、遮挡识别、作物—杂草区分、成熟度判断、域迁移
文献来自frontiers,由福建农林大学、福建师范大学闽南理工学院与三明学院研究团队发布

02
三维重建
从看见目标,到理解空间结构
二维图像能告诉机器人“这里有一个果子”,但不能完整告诉它“从哪里伸手最安全”。
农业机器人要真正执行,就必须理解空间结构。
果实离机械臂多远,枝叶挡住了多少,果柄朝哪个方向,末端执行器能不能进入,采摘路径会不会碰到旁边果实,这些都不是一张平面图能解决的问题。
所以,三维重建、点云处理、深度估计、作物数字化建模,正在成为农业机器人的前沿方向。尤其在采摘、疏果、修剪、蘑菇采收、育苗盘识别和果园巡检中,三维信息决定机器人能不能从“看见”进入“可操作”。
一些研究正在把三维重建、神经渲染、作物表型建模引入农业场景。参考稿中提到的三维高斯重建、神经辐射场、高通量表型等方向,本质上都在解决同一个问题:二维图像读不出作物真实几何,机器人需要一个可计算的三维现场。
但产业落地不能停在“模型重建得很漂亮”。
农业机器人真正需要的不是炫目的三维画面,而是可执行信息:哪里能抓,哪里能剪,哪里不能碰,哪里需要绕开。三维重建如果不能转化成可抓取点、可切割点和可通行空间,它仍然只是感知层的技术展示。
关键词
三维重建、点云、可操作性识别、作物数字孪生、
采摘点定位。
03
自主导航
按农事任务走
农业机器人第二个难题,是走。
很多人以为,装上北斗、相机和雷达,机器人就能自主移动。但农业现场的移动,比室内机器人复杂得多。
露天大田有泥土、车辙、垄沟、坡度和杂草;果园有树行、枝条、窄通道和地头转弯;温室里有立柱、轨道、管线、人员和箱筐;养殖场还有湿滑地面、栏舍和移动动物。
2026年一篇农业机器人视觉导航综述,把视觉导航拆成视觉感知、定位与建图、路径规划三部分,并专门区分开放农田和受控农业环境。前者是非结构化户外环境,后者常常面临室内定位和卫星信号受限问题。
这说明,农业机器人不是沿着地图走,而是沿着农事任务走。
除草机器人要知道哪一行已经处理,哪一行还没处理;喷施机器人要知道哪些区域需要精准用药;采摘机器人要知道哪个通道能进,哪个位置能停稳;巡检机器人要知道异常点在哪里,下次是否需要复查。
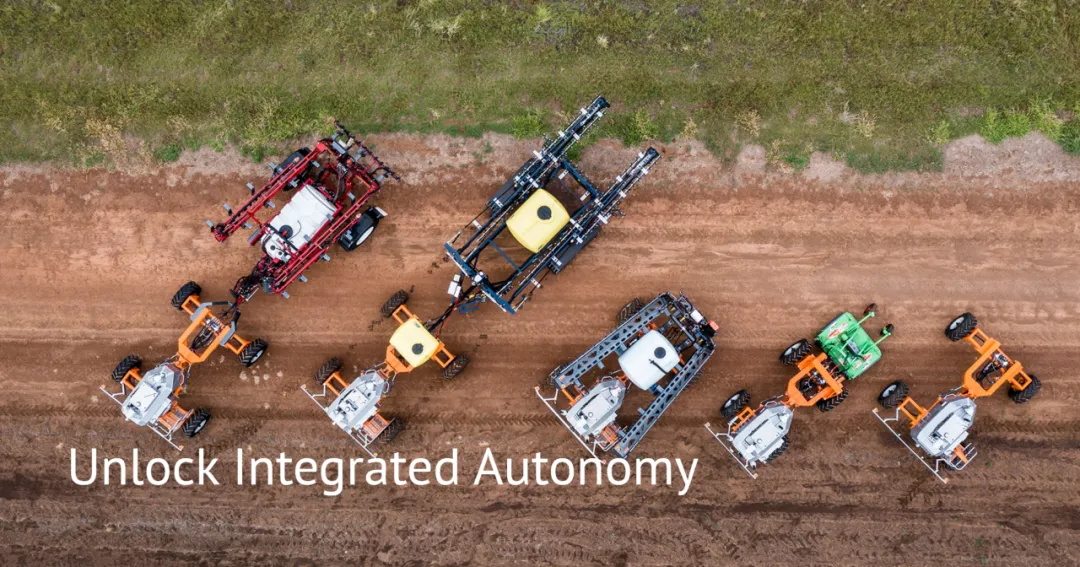
企业案例也在往这个方向走。
John Deere 2025年展示的第二代自主系统,不是重新造一台奇怪的机器人,而是在大型拖拉机、果园拖拉机等成熟装备上叠加摄像头、视觉和自主系统;
Burro 的搬运机器人则用视觉、高精度定位和人工智能,在农场、苗圃等场景完成跟随和自主运输。
导航技术的前沿,不在“能不能自动走一段”,而在“能不能把路线、任务和作业结果连起来”。
关键词
视觉导航、作物行识别、路径规划、断点续作、
棚内定位。
04
农业专用底盘
机器人下地,先看能不能站得稳
很多农业机器人项目,最后不是败在算法,而是败在底盘。
平台不稳,视觉再准也没用;底盘打滑,路线规划就会失效;车身一晃,机械臂末端误差就会被放大。
农业机器人要进田、进棚、进果园,首先要解决的是移动平台的适配问题。
农业底盘不是简单选择轮式还是履带式。
大田需要通过性和续航,果园需要坡地稳定和窄行通过,温室需要低速精准移动和小转弯半径,育苗中心需要和苗床、轨道、托盘系统匹配,养殖场还要考虑防水、防腐蚀和清洁维护。
2025年开源农业机器人 AgriCruiser 的研究很值得关注。它采用跨行结构,可调节轮距,高离地间隙,紧凑转弯,并接入精准喷施系统。研究显示,在亚麻试验地中,一次机器人喷施能够显著降低杂草数量,同时减少作物损伤。
这个案例的价值不在于它已经成为成熟商品,而在于它提醒行业:农业机器人底盘的前沿,不一定是昂贵和复杂,而是可重构、低成本、易维护、能适应不同作物行距和作业方式。
如果底盘不能适配农业现场,机器人后面的视觉、机械臂和智能决策都会失去意义。
关键词
复杂地形、跨行底盘、温室轨道、果园平台、
低速稳定控制。
05
柔性末端与力控
农业机器人最难的是轻重分寸
农业机器人真正难的动作,往往不是抓住,而是不伤作物。
工业机器人面对的是标准零件,农业机器人面对的是活的、软的、不规则的对象。草莓会压伤,番茄会掉粒,蘑菇会折断,蓝莓会掉粉,苹果会碰伤,茶芽和金银花也不能粗暴处理。
所以,柔性末端、力控和触觉传感,正在成为农业采摘机器人的核心前沿。
2025年一篇关于果蔬采摘机器人末端执行器的综述指出,不同夹持方式、分离方式、材料和驱动方式都会影响采摘效率与损伤率;单一分离动作往往适用范围有限,抓取、扭转、剪切、吸附等方式都需要根据作物特性重新设计。
2026年《自然·通讯》发表的一项研究展示了集成视觉、触觉和曲率感知的五指软体夹爪,用于适应性、非破坏性水果采摘。它把视觉、触觉、弯曲感知和旋转采摘模块整合在一起,说明农业机器人正在从“看见后抓取”,走向“接触后感知和调整”。
产业里,Advanced Farm、Four Growers、Fieldwork Robotics 等公司都在不同作物上探索采摘执行机构。
它们面对的不是同一个问题:苹果、番茄、草莓、树莓、蘑菇,每一种作物的接触方式、分离方式、损伤边界都不同。
未来农业机器人真正有价值的“手”,不是更有力,而是更有分寸。
关键词
柔性夹爪、力控、触觉传感、低损伤采摘、
吸夹剪一体化。
来自Nature Communications

06
视觉伺服与闭环控制
机器人要边看边修正
很多农业机器人早期方案,是识别目标后执行一套预设动作。
但真实农业现场里,目标会动,枝叶会晃,机器人底盘有误差,机械臂也会因为负载和震动出现偏差。一次识别结果,很难支撑完整动作。
所以,视觉伺服和闭环控制变得越来越重要。
2023年一项黄瓜采摘机器人研究,把采摘顺序、视觉伺服和末端执行器结合起来,用实时视觉反馈引导末端接近黄瓜果柄。
2026年一项针对遮挡黄瓜的采摘系统研究,也强调感知模块、机器人控制和抓切一体末端的集成,并使用眼在手上的深度相机提升作业效率。
这些研究真正有价值的地方,不是证明某个模型能识别黄瓜,而是把识别、排序、接近、切割、抓取整合成一个动作链。
这正是很多农业机器人从论文到产业落地的分水岭。
只检测,不控制,价值有限;只控制,不反馈,稳定性不足。真正能进入基地的机器人,必须边看、边动、边修正。
关键词
视觉伺服、闭环控制、末端纠偏、实时反馈、失败恢复。
07
视觉—语言—动作模型
让机器人从识别目标走向理解任务
这是最前沿,也最容易被误读的方向。
过去的农业机器人,大多是“识别一个目标,执行一个预设动作”。
未来更前沿的方向,是让机器人理解人的指令、现场画面和动作之间的关系。
比如,农场管理者不再输入复杂参数,而是直接说:“把这一垄成熟草莓摘下来,青的别碰。”
“巡检这一区域,发现病斑就标记。”
“这块苗床只处理杂草,不要伤到幼苗。”
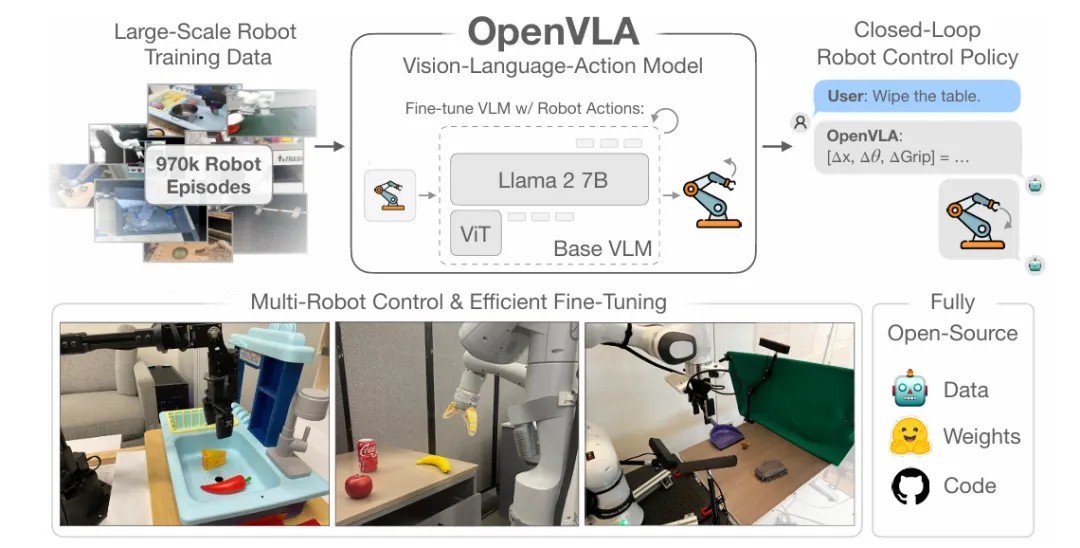
这背后对应的是视觉—语言—动作模型。
2024年开源的 OpenVLA 使用约97万条真实机器人示范数据训练,目标是让机器人把视觉、语言和动作统一起来,在不同任务和本体之间具备更强泛化能力。
农业方向也出现了早期探索。
2025年中国农业大学关于 AgriVLN 研究提出农业视觉语言导航基准,使用六类农业场景和真实机器人视角视频,让机器人根据自然语言指令导航。研究显示,加入子任务拆解后,成功率从0.33提升到0.47,但长指令仍然容易失败。(推荐阅读原文献《AgriVLN: Vision-and-Language Navigation for Agricultural Robots》)
这说明,虽然方向很热,但农业还在起跑线。
田间光照、遮挡、泥水、枝叶、作物形变、季节差异和安全风险,都比实验室桌面操作复杂得多。农业机器人也缺少大规模真实示范数据。短期内,视觉—语言—动作模型更可能先用于任务理解、指令分解和辅助决策,而不是直接接管全部动作。
关键词
视觉—语言—动作模型、跨本体泛化、任务理解、
农业示范数据、仿真到现实。
图片来源于康奈尔大学arXiv《OpenVLA:AnOpen-Source Vision-Language-Action Model》
08
农业大模型与农事决策
机器人不能只会动,还要懂农事
农业机器人不是普通自动设备。
它进入农田、温室和养殖场以后,面对的不是单一动作,而是一整套农事判断。
除草机器人不能只识别杂草,还要知道作物处在什么苗期,刀具能不能下去;精准喷施机器人不能只识别病斑,还要判断病害类型、发生程度和处置方式;采摘机器人不能只找到果实,还要理解成熟度、采收标准和分级规则;巡检机器人不能只拍到异常,还要知道这个异常是否需要报警、复查或派工。
这就是农业大模型进入农业机器人体系的意义。
它不是直接替代农艺师,也不是让机器人完全自主决策,而是把分散在作物、病虫害、气象、土壤、养殖、遥感和农事经验里的知识,变成机器人能够调用的任务理解能力。
中国农业大学发布的神农大模型,是国内农业大模型方向里很值得关注的案例。公开资料显示,神农大模型已经覆盖育种、种植、养殖、农业遥感和气象等多个农业应用场景,支持图像、语音、视频等多类型数据分析。升级到3.0版本后,它进一步强调农业知识问答、农业图像分析、农业场景推理和农业生产决策。
这对农业机器人有直接启发。
未来的机器人不能只是“看见一个目标,然后执行一个动作”。它更需要理解:为什么要执行这个动作,什么时候执行,执行到什么程度,结果怎么记录,异常怎么反馈。
比如温室巡检机器人发现叶片异常,大模型可以结合图像、作物生育期、温湿度、历史病害记录,生成初步判断和处理建议;除草机器人识别到杂草压力上升,也需要结合苗期、行距、地块作业记录,决定是机械除草、精准喷施,还是先标记复查。
但这类能力短期内不能被神化。
农业大模型最怕脱离现场数据给出“看似专业”的错误建议。农业里的错误判断不是一句话错了,而可能意味着误喷药、误除苗、误判病害、错过采收窗口。
所以,在农业机器人体系里,大模型更现实的角色,是先做辅助决策、任务拆解、异常解释和作业建议,再逐步进入自动执行闭环。真正成熟的方向,不是让模型单独“拍板”,而是让模型、农艺师、现场数据和机器人动作形成协同。
关键词
农业大模型、农事决策、任务理解、异常解释、
人机协同。

09
多机协同
从一台机器,到一条作业链
农业作业很少是一个孤立动作。
采摘之后要搬运,搬运之后要分选,分选之后要包装;巡检之后要报警,报警之后要派工;喷施之后要记录,记录之后要复查。
所以,农业机器人的未来不只是单机能力,而是多机协同和作业链调度。
2026年一项关于农业机器人群体控制的研究,在柑橘果园中做了多年田间验证,提出群体机器人框架能够提升作业效率和环境适应性。 这类研究还需要更多场景验证,但方向很清楚:农业机器人要从单机走向群体,从动作走向流程。
产业里,Burro 这类搬运机器人已经走出了一条很现实的路径。它没有一开始挑战最难的采摘动作,而是从田间和苗圃搬运切入,用视觉、高精度定位和自主导航完成跟随、路线学习和多任务运输。
这条路径很有启发。
很多农业机器人不一定一开始就做“最聪明的机器”,而是先做最容易接入作业流程的机器。搬运、巡检、喷施、转运这些环节,可能比复杂采摘更早形成规模化应用。
多机协同不是多买几台机器人,而是要解决任务分配、路径避让、作业节拍、设备通信、数据同步和异常处理。
关键词
多机协同、群体机器人、任务调度、作业链、无人农场。
10
数据闭环与作业验证
机器人最后要进入经营结果
农业机器人最终不是科研样机,也不是视频素材,而是生产工具。
它要回答的问题不是“能不能动”,而是:作业了多少亩,采了多少斤,损伤率多少,漏采率多少,喷施用量多少,故障在哪里,人工是否减少,品质是否更稳定。
这也是为什么,真正值得关注的公司,往往都不只讲单点技术。
Carbon Robotics 的激光除草设备不仅识别和处理杂草,还通过作业数据积累继续训练模型;Ecorobotix 的精准喷施设备强调植物级处理和减少药剂使用;John Deere 的自主设备则把视觉、自动驾驶、远程管理和成熟农机平台绑在一起。
这些案例说明,产业落地不是比谁的概念最新,而是比谁能把技术放进真实作业流程。
一项检测技术,如果不能接喷头、刀具、激光、机械臂或作业记录,就很难变成产业价值。一台机器人,如果不能连续运行、维护方便、数据可追溯、客户能算清价值,也很难走出样板间。
农业机器人的最后一公里,不是从实验室到农田,而是从一次动作到一套经营结果。
关键词
作业数据、可追溯、运维系统、投入产出、服务化模式。
11
10个方向,一条暗线
这10个前沿技术,不是并列清单,而是一条递进链条。
感知智能,解决机器人看不看得懂;移动智能,解决机器人到不到得了;操作智能,解决机器人干不干得稳;认知智能,解决机器人懂不懂任务;协同智能,解决机器人能不能跑完整流程;运营闭环,解决机器人有没有真实经营价值。
贯穿其中的,是同一个问题:农业机器人能不能从论文、样机和演示视频,走进真实农业现场。
技术的天花板很高,但农业机器人的真正较量,不发生在实验室那一次成功动作里,而发生在它能否连续工作一天、一季、一个基地。
这也是农业机器人最值得深度研究的地方:它的前沿不只在模型、算法和硬件里,也在实验室与田间之间那段尚未完全走通的路上。
#智慧农业#农业机器人#采摘机器人#清华农业#农业机器人开发#农业机器人定制研发#农业机器人研发找陈灏#清华装备院陈灏#农业自动化#农业无人机
清研智慧农业
清研智慧农业源于清华大学天津高端装备研究院智能系统与大数据研究中心,依托清华大学顶尖科研力量与天津产业创新平台,深度融合“软件、智能装备与大数据”三大核心技术,致力于为智慧农业、工业自动化及高端制造领域提供领先的智能化解决方案。
我们不仅开展前沿技术研究,更注重成果转化与产业赋能,已成功研制出农业采收机器人、智能除草系统、农业无人机、高端自动化产线等一系列具有自主知识产权的装备与系统,推动产业向智能化、绿色化、高效化升级,助力中国从“制造大国”迈向“制造强国”。

特别说明

本文部分内容(包括但不限于文字、图片、数据等)来源于互联网公开信息,旨在传递更多资讯,仅供学习交流之用。其版权均归原作者或原始出处所有。
为支持原创,本公众号会尽量标注来源。如您发现本公众号中有内容侵犯了您的合法权益,请立即通过后台留言或添加客服微信等方式与我们联系,我们将在核实后第一时间进行处理。
未经本公众号明确授权,任何个人或组织不得将本文内容用于商业性转载或摘编。转载请联系后台开白;凡从本公众号转载本文至其他平台所引发的一切纠纷、后果及法律责任,均由转载方自行承担,本平台概不负责。
*往期精选*
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 河北农业大学助力乡村振兴和青县产业发展志愿服务团成立暨暑期社会实践活动启动仪式在青举行
- 【高质量发展】平坝区精耕“一粒米”做优农业产业链
- 河北农业大学助力乡村振兴和青县产业发展志愿服务团成立暨暑期社会实践活动启动仪式在青举行
- 河南农业大学刘保国教授一行到访兴港市政调研交流
- 【高质量发展】平坝区精耕“一粒米”做优农业产业链
- 筑牢质量安全防线 市农业农村局召开杨梅生产质量安全工作暨培训会
- 筑牢质量安全防线 市农业农村局召开杨梅生产质量安全工作暨培训会
- 27择校!四川农业大学2026旅游管理MTA复录情况分析
- 27择校!四川农业大学2026旅游管理MTA复录情况分析
- 承德鱼儿山承垦农业发展有限公司 公开招聘工作人员体检的公告
