华中农业大学王鹏团队Nano Energy:新型柔性阵列摩擦电压力传感器问世,赋能机器人智能无损抓取
2026 年 2 月,华中农业大学工学院王鹏教授团队联合中国科学院北京纳米能源与系统研究所张弛研究员团队、武汉大学动力与机械学院廖凌祎团队,在国际能源与纳米材料领域顶级期刊《Nano Energy》上发表了一项关于机器人柔性触觉感知的重要研究成果。该研究提出了一种基于 PDMS/CNT/CB 变曲率摩擦层的柔性阵列式摩擦电压力传感器(PCC-ATPS),突破了现有触觉传感器在柔性适配、环境稳定性与空间分辨率上的核心瓶颈,为机器人智能无损抓取技术的发展提供了全新的技术路径。一、研究背景
触觉感知是机器人从被动执行指令向主动环境感知、精准物体操控升级的核心能力,更是实现农产品分拣、易碎品操作等需要轻柔接触的无损抓取场景的关键支撑。在机器人系统中,压力传感器作为触觉感知体系的核心单元,其性能直接决定了机器人环境交互与灵巧操作的上限。但当前主流的柔性压力传感器,普遍难以同时兼顾复杂曲面的共形贴合、复杂工况下的工作稳定性、阵列式多点传感能力,同时还面临着灵敏度与功耗、结构紧凑性难以平衡的行业痛点。近年来,基于摩擦起电与静电耦合效应的摩擦纳米发电机(TENG)技术,凭借自供电、高灵敏度、结构简单、成本低廉的独特优势,成为柔性触觉传感领域的研究热点。然而,现有 TENG 基摩擦电压力传感器的性能,高度依赖摩擦层材料的电学与力学性能、表面微结构设计。传统的材料改性方案常面临填料团聚、电荷泄漏的问题,而微锥、微针等常规表面微结构设计,易出现应力集中、结构疲劳失效等问题,严重制约了传感器的长期工作稳定性与输出性能,难以满足机器人触觉感知的长期可靠应用需求。因此,开发一款集高灵敏度、优异柔性、阵列多点传感能力与强环境适应性于一体的柔性压力传感器,成为机器人领域亟待突破的核心课题。二、研究内容
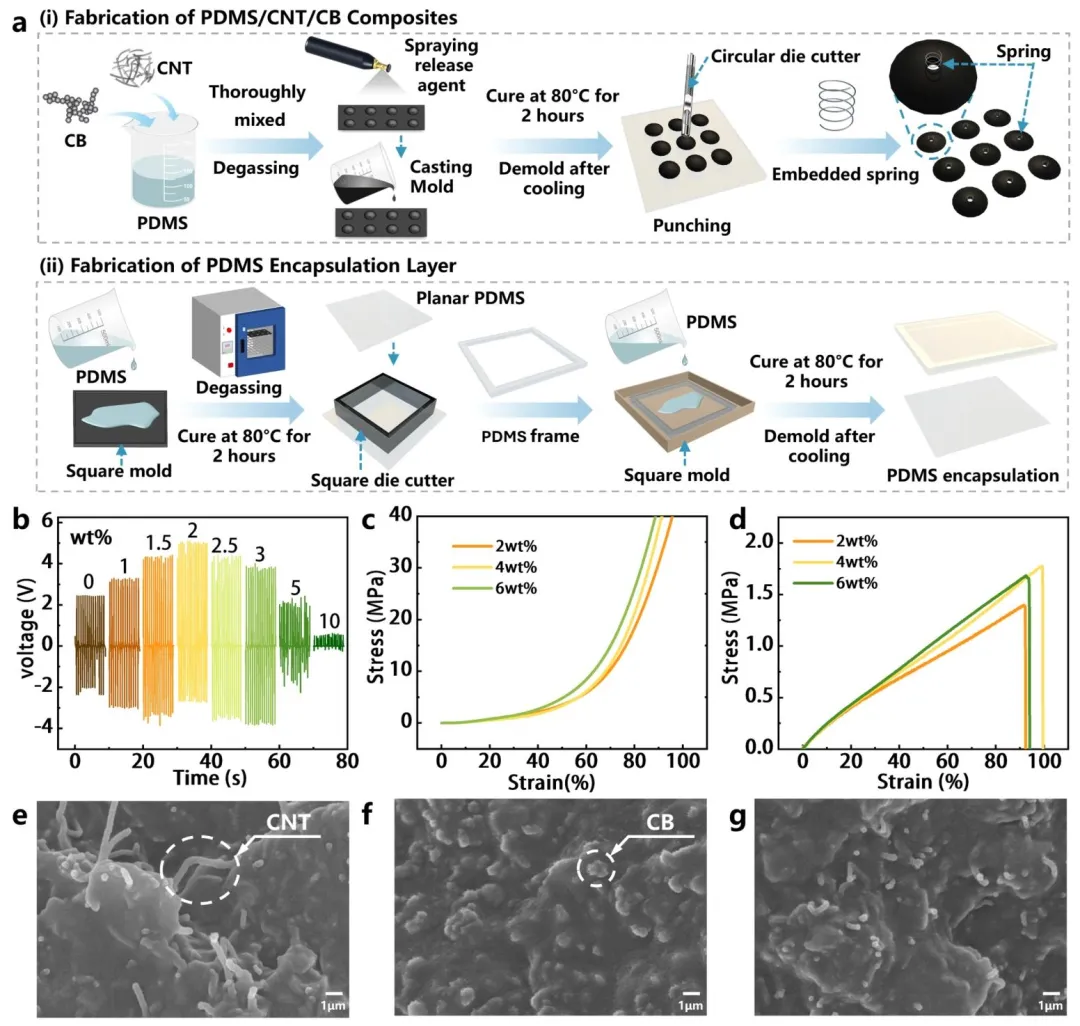
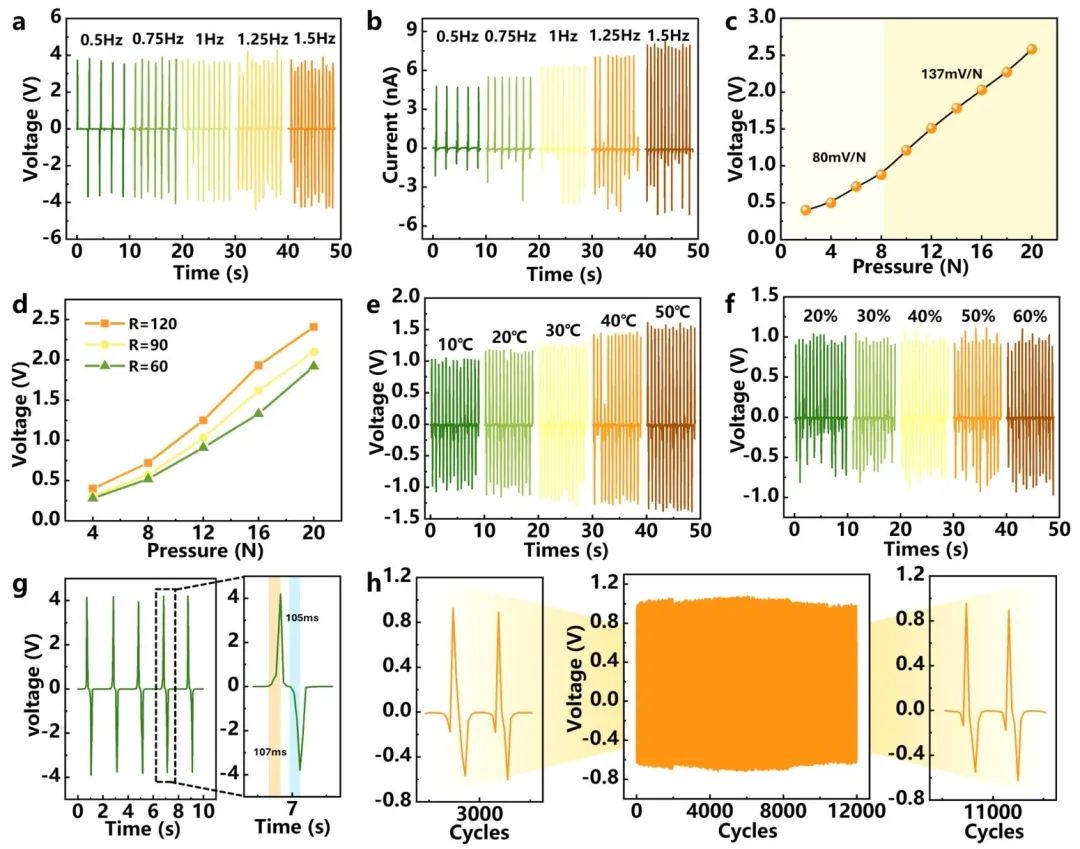
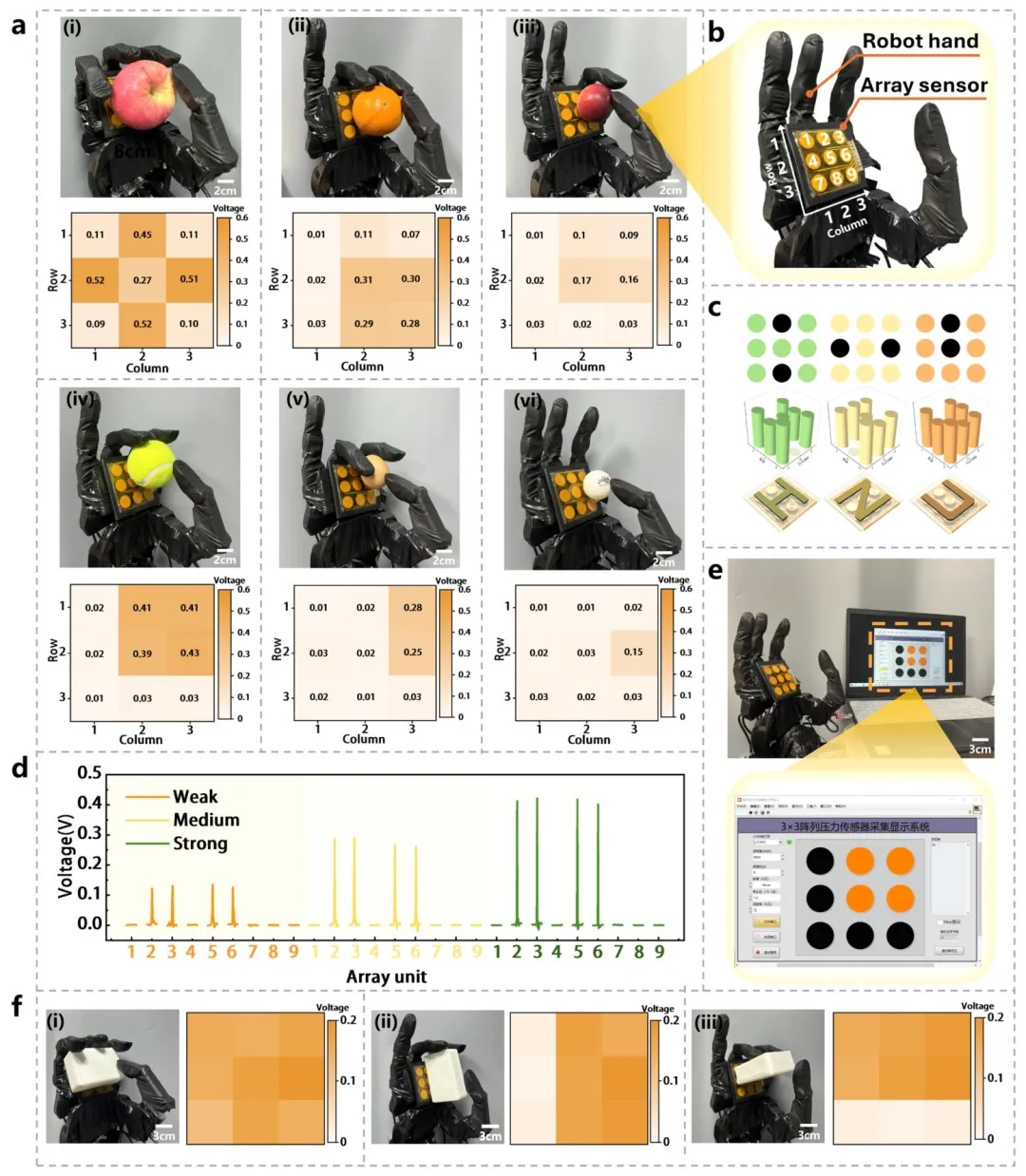
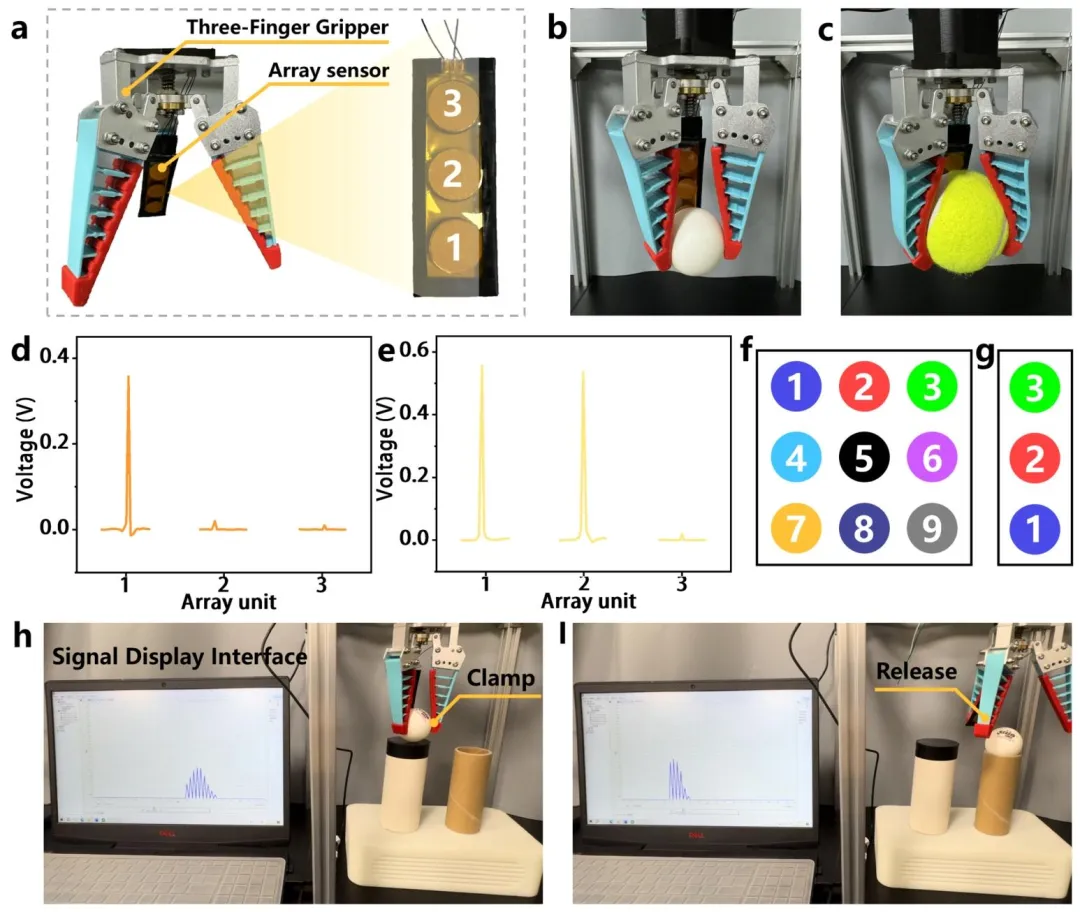
本研究围绕摩擦电触觉传感器的材料、结构、性能与系统集成开展了全链条创新,成功研发出面向机器人触觉感知的 PCC-ATPS 传感器,核心研究内容如下:在材料体系创新上,研究团队创新性地在聚二甲基硅氧烷(PDMS)基体中,引入碳纳米管(CNT)与炭黑(CB)两种纳米填料,构建了 PDMS/CNT/CB 三元复合摩擦电材料体系。其中,CNT 的均匀掺杂为复合材料构建了高效的内部导电网络,而 CB 则有效抑制了混合体系的团聚效应,显著提升了填料的分散均匀性与材料的力学性能。实验结果表明,当 CNT 掺杂浓度为 2 wt%、CB 掺杂浓度为 1 wt% 时,复合材料与铜电极接触分离时的输出电压,较纯 PDMS 材料提升了 108%;同时该复合材料可承受 40 MPa 的压力而不发生断裂损伤,2 wt% CNT 掺杂的样品断裂伸长率达 91%,拉伸强度为 1.4 MPa,兼具优异的电学输出与力学韧性。在传感器结构设计上,团队提出了变曲率摩擦层搭配弹簧辅助弹性支撑的全新结构方案,并设计了多层堆叠的 3×3 阵列式传感架构。变曲率的复合摩擦层可在压力作用下实现接触面积的自适应扩展,使应力沿曲面均匀分布,从根本上避免了传统微结构的应力集中问题;内嵌的弹簧结构则大幅提升了传感器的弹性恢复能力,保障了接触分离循环的稳定性与重复性。最终制备的 PCC-ATPS 传感器整体厚度仅 5 mm,具备优异的弯曲柔性,可完美适配机器人机械手的曲面贴装需求。在核心性能表征中,该传感器展现出全面领先的综合性能:其压力检测范围覆盖 0.5–30 N,在 0.5–8 N 低压区间灵敏度达 80 mV/N,8–20 N 高压区间灵敏度进一步提升至 137 mV/N,实现了双区间高灵敏响应;传感器响应时间仅 107 ms,恢复时间 105 ms,可精准捕捉瞬态触觉刺激;在 12000 次循环加载测试中,传感器输出电压无明显衰减与漂移,具备优异的长期工作耐久性。同时,得益于 PDMS 封装的疏水特性与多层堆叠结构设计,传感器在 20%–60% 相对湿度环境中输出性能保持稳定,在 10–50℃温度区间内也具备可控的工作特性,环境适配能力突出。在实际应用验证中,研究团队将 PCC-ATPS 成功集成于仿生机器人夹持器表面,搭建了配套的智能交互数据采集与显示系统。实验结果显示,该传感器阵列在机器人抓取苹果、橙子、鸡蛋、乒乓球等不同材质、不同形状的物体时,可精准识别接触压力的大小与空间位置,实时还原抓取过程中的力场分布并生成可视化压力热力图;同时,该传感器还实现了字母识别、物体不同表面的形状区分,可有效分辨弱、中、强三档不同的夹持力度。此外,团队还将传感器重构为 1×3 线性阵列,成功实现了柔性机械手爪指尖的高分辨率压力监测,为机器人灵巧操作提供了实时触觉反馈。三、研究总结
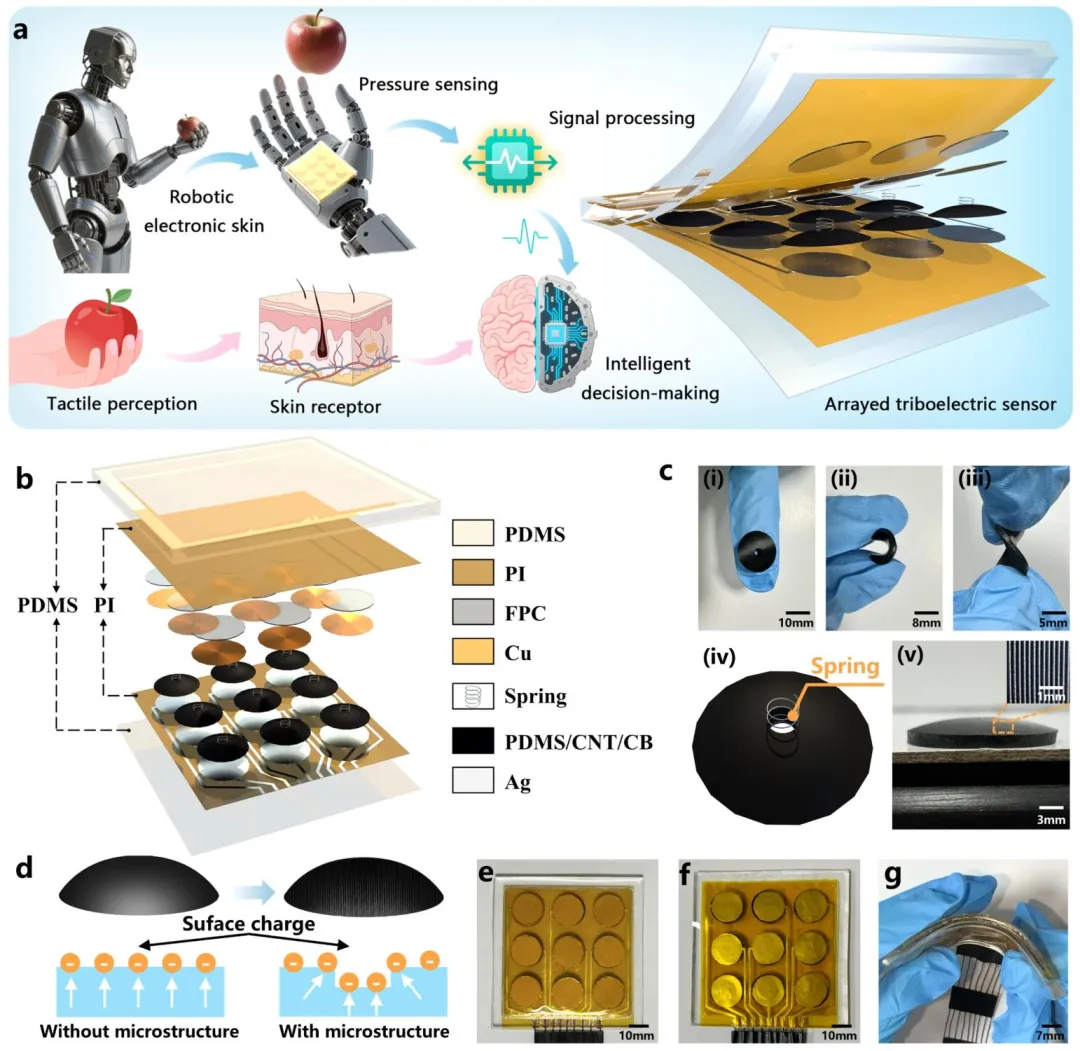
这项研究通过材料体系创新与结构设计优化的协同,成功开发出一款兼具高灵敏度、宽检测范围、优异柔性与长期稳定性的阵列式摩擦电压力传感器,有效解决了现有摩擦电器件在柔性适配、环境适应性、空间分辨率方面的核心挑战。该研究不仅为柔性触觉传感器的设计提供了全新的思路与方法,更搭建了一套可落地的机器人触觉感知解决方案,为农业机器人、工业机器人的智能无损抓取、精准环境交互等应用奠定了关键的技术基础。未来可以进一步通过微纳加工工艺缩小传感单元尺寸,提升阵列密度与空间分辨率,实现更精细的触觉特征识别;同时将温湿度等多模态传感单元与压力传感阵列异构集成,开发具备类皮肤多模态感知能力的多功能集成系统,推动下一代全自供电、高分辨率、多模态感知的柔性电子皮肤技术向更智能、更仿生的方向持续发展。图 1 基于 PCC-ATPS 的机器人触觉感知系统。(a) 机器人触觉感知系统示意图(b) PCC-ATPS 结构原理图(c) PDMS/CNT/CB 复合材料:(i) 与手指尺寸对比;(ii) 弯曲状态;(iii) 扭转状态;(iv) 内嵌弹簧结构示意图;(v) 侧面形貌与表面微结构(d) 表面微结构提升电荷承载能力示意图(e) PCC-ATPS 器件正面实物图(f) PCC-ATPS 器件背面实物图(g) 传感器展现出优异的柔性
图 2 传感器制备工艺与 PDMS/CNT/CB 复合材料表征。(a) 制备工艺流程:(i) PDMS/CNT/CB 复合材料制备;(ii) PDMS 封装层制备(b) 不同 CNT 含量复合材料的输出电压信号(c) PDMS/CNT/CB 复合材料的压缩应力 - 应变曲线(d) PDMS/CNT/CB 复合材料的拉伸应力 - 应变曲线(e) PDMS/CNT 复合材料的扫描电子显微镜 (SEM) 图像(f) PDMS/CB 复合材料的扫描电子显微镜 (SEM) 图像(g) PDMS/CNT/CB 复合材料的扫描电子显微镜 (SEM) 图像
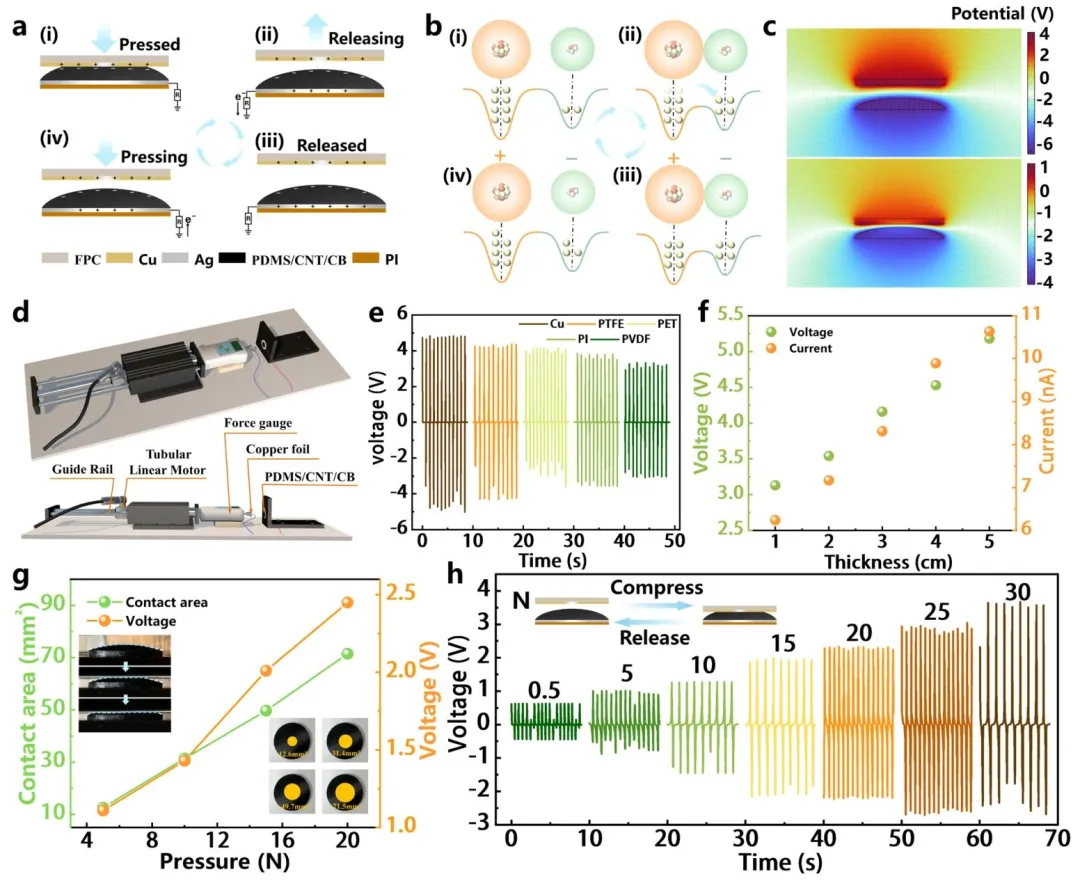
图 3 传感器工作原理、仿真与基础输出性能。(a) 传感器接触 - 分离过程中的电荷转移示意图(b) 电子云重叠势能阱模型(c) 摩擦电压力传感器的有限元仿真电势分布(d) 恒力传感测试装置示意图(e) 与不同材料接触 - 分离时的输出电压信号(f) 不同厚度 PDMS/CNT/CB 材料的输出电压信号(g) 不同压力下的接触面积与输出电压关系(h) PDMS/CNT/CB 复合材料与铜在不同压力下接触 - 分离的动态响应特性
图 4 PCC-ATPS 传感器综合性能表征。(a) 不同接触 - 分离频率下的输出电压(b) 不同接触 - 分离频率下的输出电流(c) 传感器在不同压力下的输出电压与灵敏度(d) 传感器在不同弯曲程度下的输出电压(e) 传感器在不同温度下的输出电压(f) 传感器在不同湿度下的输出电压(g) 传感器的响应速度(h) 传感器的耐久性测试
图 5 PCC-ATPS 在触觉感知中的应用。(a) 阵列式压力传感器用于机器人触觉感知:(i) 苹果;(ii) 橙子;(iii) 油桃;(iv) 网球;(v) 鸡蛋;(vi) 乒乓球(b) 阵列式压力传感器集成于机械臂表面示意图(c) 传感器用于字母识别(d) 传感器用于感知同一物体的三类抓取力(e) 压力传感器数据采集与显示系统(f) 同一物体不同表面的形状识别:(i) 正面;(ii) 侧面;(iii) 背面
图 6 1×3 阵列传感器用于柔性机器人夹持器压力感知。(a) 1×3 阵列传感器用于柔性机器人夹持器压力感知(b) 抓取乒乓球(c) 抓取网球(d) 抓取乒乓球时的阵列单元信号(e) 抓取网球时的阵列单元信号(f) 3×3 阵列传感器单元在上位机界面对应的电信号颜色(g) 1×3 阵列传感器单元在上位机界面对应的电信号颜色(h) 抓取乒乓球时的上位机信号(i) 释放乒乓球时的上位机信号
具体细节请阅读原论文......
原文链接:https://doi.org/10.1016/j.nanoen.2026.111829
本公众号发布的内容(包括但不限于文字、图片、视频、音频及设计素材等),如有侵权,请联系删除。我们始终尊重知识产权,严格遵守《中华人民共和国著作权法》等相关法律法规,致力于维护健康的内容创作环境。欢迎大家投稿或私信,各类推文,包含招生信息,论文推广等,请联系邮箱:sensorsxx@163.com