于艳,王晓敏,尚书旗*,谭晓志,伊大志,董伟康,宋宇帅
(青岛农业大学机电工程学院,青岛266109,山东,中国)
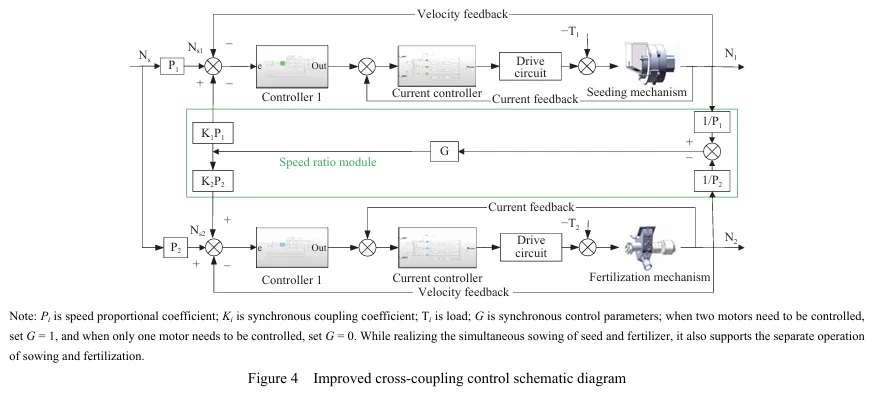
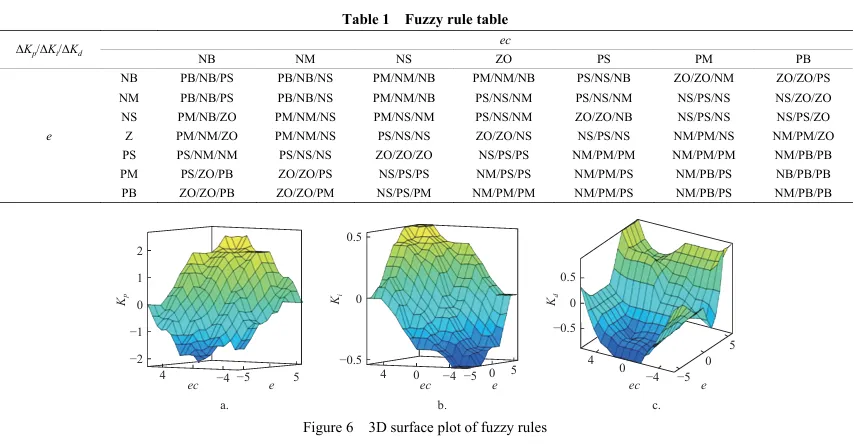
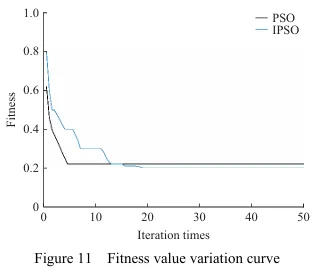
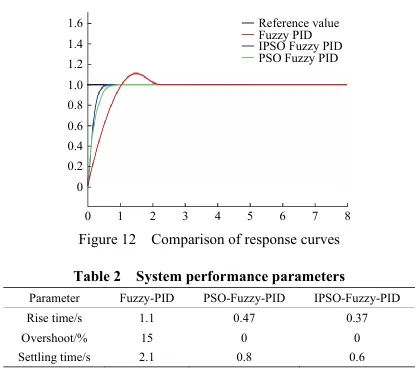
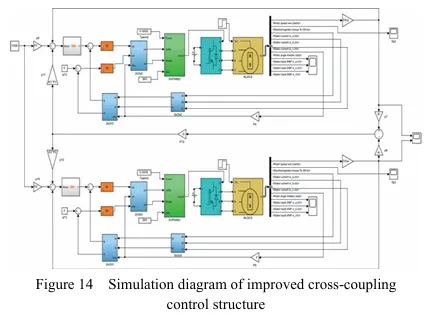
摘要:针对现阶段花生播种机智能化水平低,播种、施肥质量不稳定,以及一次性多项工作协同能力差的问题,该研究提出一种电驱式花生播种机种肥同播协同控制方法。采用一种改进型交叉耦合控制结构实现播种施肥的协同控制,设计模糊PID控制器,为解决作业过程中控制电机目标转速发生较大变化时,超调过高以及系统跟随性较差问题,引入改进粒子群优化算法,减少超调,提高响应速度,提升种肥同播控制系统的控制精度以及稳定性。
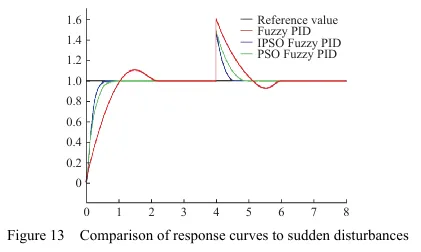
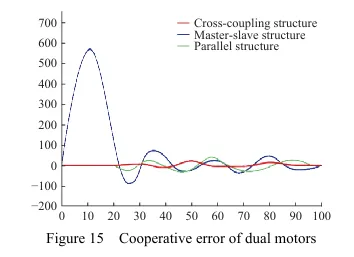
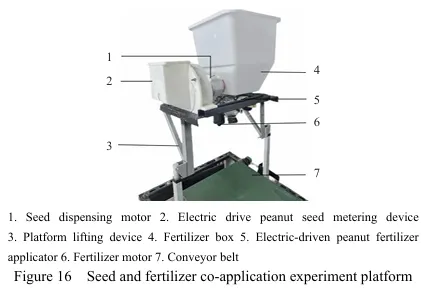
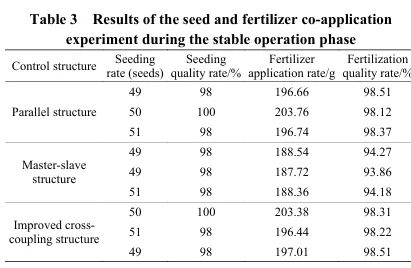
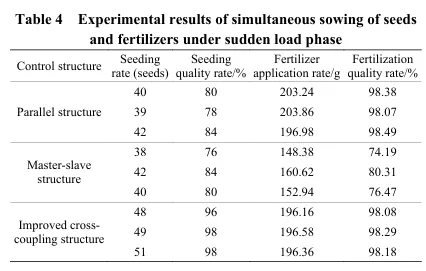
在MATLAB/Simulink仿真实验平台上对该方法进行仿真分析,仿真结果表明,改进后控制器的动态性能和抗干扰性能均有显著提升,为验证该控制方法的有效性,设计花生种肥同播试验,试验数据显示,稳定工作时,平均播种合格率98.67%,平均施肥合格率98.34%,突加负载时,平均播种合格率97.33%,平均施肥合格率98.18%,该方法在不同工况下保持了较低的波动范围,有效实现花生精密种肥同播。该研究可为花生高效种植提供有效技术参考。
关键词:种肥同播;改进粒子群算法;改进型交叉耦合;控制系统
DOI: 10.25165/j.ijabe.20251806.9547
引用信息: Yu Y, Wang X M, Shang S Q, Tan X Z, Yi D Z, Dong W K, et al. Cooperative control method of seed and fertilizer simultaneous sowing of electric drive peanut planter. Int J Agric & Biol Eng, 2025; 18(6): 212–220.
Cooperative control method of seed and fertilizer simultaneous sowing of electric drive peanut planter
Yan Yu, Xiaomin Wang, Shuqi Shang*, Xiaozhi Tan, Dazhi Yi, Weikang Dong, Yushuai Song
(College of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao 266109, China)
Abstract: Aiming at the problems of low intelligence level of peanut seeder, unstable quality of sowing and fertilization, and poor coordination ability of one-time multi-work, this paper proposes a cooperative control method for simultaneous sowing and fertilization in electric-driven peanut planters. In this method, an improved cross-coupling control structure is proposed to realize the cooperative control of sowing and fertilization, and a fuzzy PID controller is designed. In addition, in order to solve the problem of high overshoot and poor system follow-up when the target speed of the control motor changes greatly during the operation process, an improved particle swarm optimization algorithm is introduced to reduce overshoot, improve response speed, and improve the control accuracy and stability of the seed and fertilizer simultaneous sowing control system. The method was simulated and analyzed on the Matlab/Simulink simulation platform, and the simulation results indicate that the dynamic performance and anti-interference capability of the improved controller have been significantly enhanced. To verify the effectiveness of this control method, an experiment on simultaneous sowing and fertilization of peanuts was designed. The experimental data showed that under stable operation, the average sowing qualification rate was 98.67% and the average fertilization qualification rate was 98.34%; under sudden load conditions, the average sowing qualification rate was 97.33% and the average fertilization qualification rate was 98.18%. The method maintained a low fluctuation range under different working conditions, effectively achieving precise simultaneous sowing and fertilization of peanuts. This research can provide an effective technical reference for efficient peanut cultivation.
Keywords: simultaneous sowing and fertilization, IPSO algorithm, improved cross-coupling structure, control system
DOI: 10.25165/j.ijabe.20251806.9547
Citation:Yu Y, Wang X M, Shang S Q, Tan X Z, Yi D Z, Dong W K, et al. Cooperative control method of seed and fertilizer simultaneous sowing of electric drive peanut planter. Int J Agric & Biol Eng, 2025; 18(6): 212–220.