Large Language Models and Foundation Models in Smart Agriculture: Basics, Opportunities, and Challenges
第一作者:Jiajia Li
通讯作者:Zhaojian Li *, Xunyuan Yin *
📍 Michigan State University / Nanyang Technological University
Foundation ModelsLLM/GPTSAMZero-shotSmart Agriculture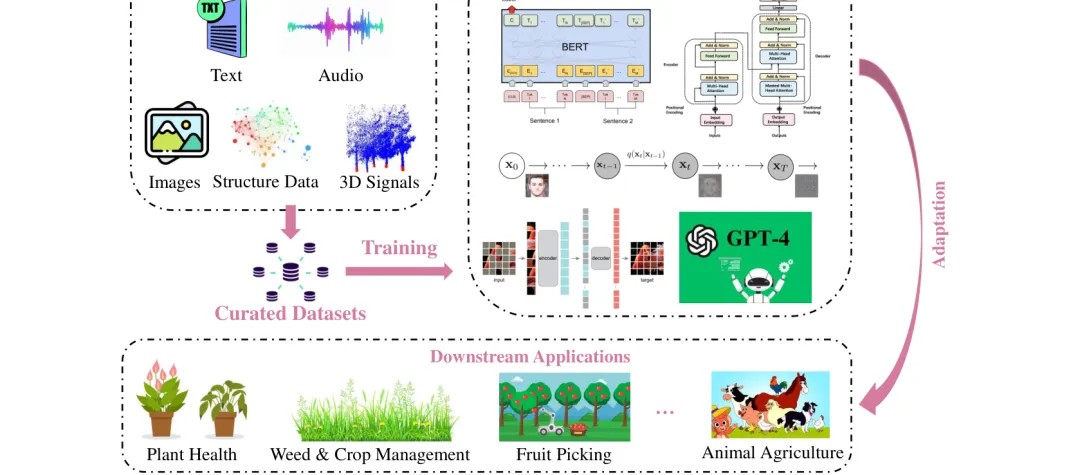
▲ Fig.1 农业基础模型 (AFM) 构建总览:(左) 多模态数据采集阶段,涵盖文本、图像、3D 信号、音频和结构化数据;(中) 在预清洗的策划数据集上训练/微调 LLM 与 FM(如 BERT、GPT-4);(右) 下游适配到具体农业任务,包括植物健康监测、杂草与作物管理、果实采摘、动物养殖等
研究背景
• 传统 DL 在农业场景(杂草检测、病害识别、果实采摘等)严重依赖大规模标注数据,采集成本高、泛化性差,单一任务模型无法跨场景迁移
• 迁移学习(ImageNet 预训练 + Fine-tune)和少样本学习虽可缓解标注瓶颈,但预训练数据仍局限在单一域和单一模态,跨域适应性受限
• 基础模型 (FM) 范式——在海量多域多模态数据上自监督预训练后,仅需极少量微调即可解决下游任务——尚未被农业界系统性探索
研究目标
系统性梳理通用 CS 领域的四类基础模型(语言 FM、视觉 FM、多模态 FM、强化学习 FM),评估其在智慧农业五大场景(智能作物管理、智能育种、智慧畜牧、精准水产、农业机器人)中的落地潜力与关键瓶颈。
四大模型
🔹 语言基础模型 (LFMs)
🔹 视觉基础模型 (VFMs)
🔹 多模态基础模型 (MFMs)
🔹 强化学习基础模型 (RLFMs)
案例
📊 FM 在农业的已验证收益
• SAM 的零样本分割在畜禽场景下已接近人工标注精度(mIoU 94.8%),直接节省了标注人力
• LLM 辅助农业机器人设计流程(概念构思 → CAD 引导 → 代码生成),将跨学科知识的获取门槛从"团队协作"降低到"对话交互"
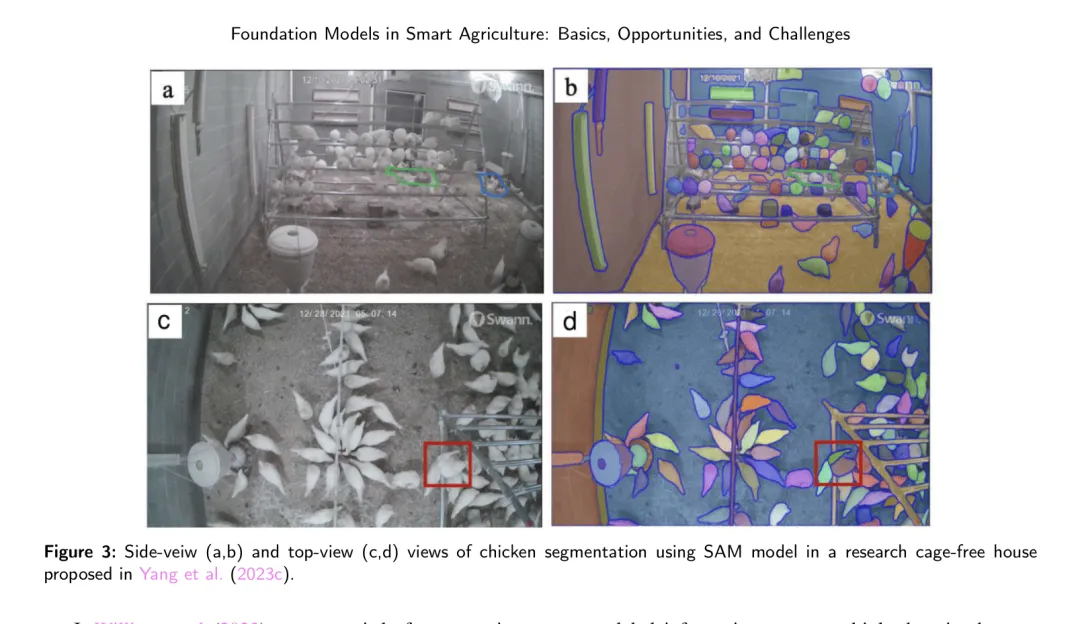
▲ Fig.2 SAM 在笼养鸡分割任务上的零样本表现 (Yang et al., 2023c):(a) 侧视 RGB 原图;(b) 侧视 SAM 分割掩膜输出(逐只鸡实例着色);(c) 俯视 RGB 原图;(d) 俯视 SAM 分割掩膜输出——无需任何微调即可精确区分密集排列的个体鸡
🔬 四大新兴落地方向
• 智能作物管理:MFM 融合卫星图 + 土壤传感 + 市场价格多模态输入,解决农田级实时决策
• 智能育种:MFM 处理基因组-环境-互作三维组学数据,加速表型预测精度
• 精准水产:生成式 FM 补充水下低质量训练样本,RLFM 用于投喂决策优化
• 农业机器人:RLFM 驱动精准控制 + LFM 辅助概念设计,完整覆盖 AgriRobot 研发链
⚠️ 关键挑战
• 数据采集:农田环境变量多(作物品种、生长期、土壤、气象),采集需跨年时间序列,且农户数据隐私问题严峻,可借助联邦学习缓解
• 训练效率:VPGTrans 通过在已有 FM 之间迁移视觉提示生成器 (VPG),实现 10x 以上训练加速,仅需少量数据
• 分布偏移:LLM 在话题分布漂移时性能骤降 88%,通过神经变分动态主题模型可压缩至 2%;SAM/CLIP 结合多任务学习和蒸馏也可缓解域漂移
• 边缘部署:FQ-ViT 全量化仅用 1/4 内存,精度损失约 1%;MobileSAM 比原版小 60 倍且性能持平,适合在无人机/田间传感器端推理
总结:
LFM 适合辅助研发流程(概念设计、元数据治理);VFM 的 SAM 在标注稀缺的畜禽场景已即插即用;MFM 的 CLIP/BLIP 路径适合多源异构传感融合;而 RLFM 则是 AgriRobot 自主决策的最后一块拼图但目前完全空白。伴随 MobileSAM、VPGTrans 等轻量化/高效迁移技术的成熟,FM 从实验室走向田间的通道正在真正打通。
推荐指数
⭐⭐⭐⭐⭐
📄 论文链接
https://arxiv.org/abs/2308.06668
遥感与数字农业 · 论文精选
📖 纯人工精读论文 · 匠心挖掘硬核技术精髓
关注我们,获取最新前沿研究深度速递 🌾
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
