全局快门相机:赋予农业机器人“清晰视野”的核心技术
- 2026-06-21 10:08:10

一、 快门原理:滚动快门与全局快门的本质区别
要理解全局快门的优势,首先需要了解两种快门的工作机制。
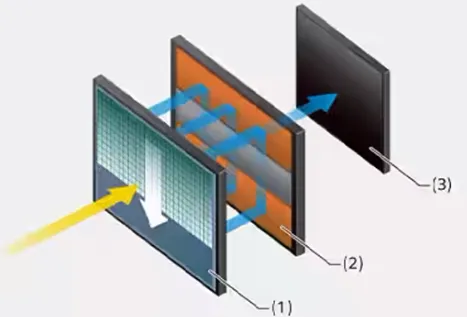
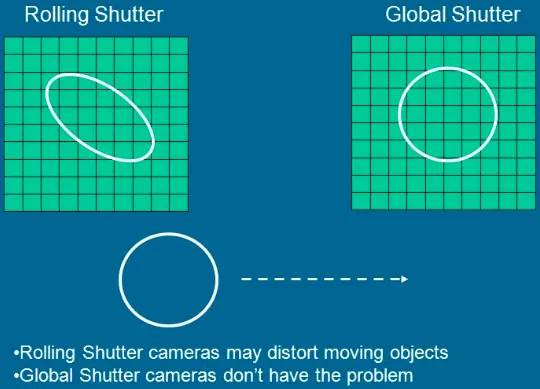
卷帘快门(Rolling Shutter):在这种相机中,图像传感器上的像素行是逐行顺序曝光的,就像一道“扫描线”从上到下移动。当拍摄对象或相机本身处于快速运动状态时,这种逐行曝光的特性会导致图像出现扭曲、倾斜或“果冻效应”等失真现象,我们称之为快门伪影。这并非简单的运动模糊,而是一种因曝光时间差导致的几何失真。
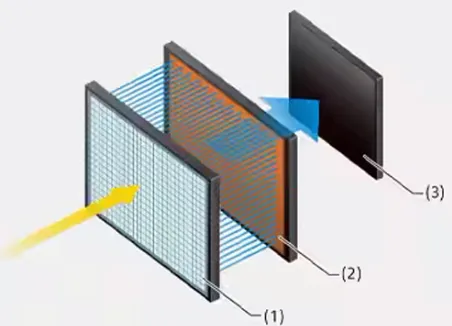
全局快门(Global Shutter):与卷帘快门相反,全局快门相机让传感器上的所有像素在同一瞬间同时开始和结束曝光。这意味着它能在一瞬间捕获整个场景的完整画面,能够生成与真实场景完全一致的图像“快照”,从而彻底避免了因逐行曝光产生的运动失真。
简而言之,滚动快门是“扫描式”记录,而全局快门是“瞬间定格”。当涉及高速运动时,全局快门在图像保真度上具有无可比拟的优势。
二、 为何农业机器人需要全局快门?
农业环境动态且复杂。以自动除草机器人为例,无论是机器人自身的移动,还是风吹导致的植物晃动,都会给可靠的图像采集带来挑战。如果使用滚动快门相机,由于图像失真,机器人可能无法准确定位杂草的精确坐标,这将严重影响其除草作业的准确性和效率,甚至导致任务失败。
全局快门相机正是为此类场景而生。它能确保在高速运动中依然捕获清晰、无失真的图像,使得农业机器人能够:
精确定位:准确识别果实、蔬菜或杂草的坐标。
准确分类:可靠地辨别作物或杂草的种类。
精准评估:对作物生长状态、病害或成熟度进行准确判断。
三、 全局快门的典型应用场景
在自动化农业中,并非所有应用都需要全局快门,但在以下特定场景中,它往往是首选:
农业无人机:无人机广泛用于作物计数、密度测量、植被指数计算和水分需求评估等。当无人机需要高速飞行并同时进行图像采集时(例如进行快速测绘或应急巡查),卷帘快门相机极易产生图像变形。具备全局快门功能的相机能确保在高速运动中获取稳定、清晰的图像数据。
大型自动驾驶农用车辆:包括卡车和拖拉机在内的农用车辆,其任务涵盖运输饲料、拖曳设备等。在有人驾驶车辆中,相机常用于环视系统,为驾驶员提供360度视野以避免碰撞。在无人驾驶车辆中,相机则用于自动导航,通过精确测量物体和障碍物的深度来规划路径。如果场景中有物体(或其他车辆)快速移动,此时全局快门相机就能派上用场。
分拣与包装机器人:这类机器人用于对农场收获的水果、蔬菜等进行分类和包装。如果待分拣的物体是静止的,则不一定需要全局快门。然而,如果物体被放置在快速移动的传送带上,全局快门相机就能输出质量更高、更清晰的图像,从而确保机器人能够准确识别和抓取目标。
四、 如何选择:没有“一刀切”的方案
需要强调的是,相机快门类型的选择必须基于具体应用场景个案分析,不存在通用的解决方案。在绝大多数农业应用中,一台高帧率的滚动快门相机,甚至普通的滚动快门相机,就足以完成任务。决定是否需要全局快门的关键因素在于:场景中是否存在足以导致滚动快门失真的高速相对运动。
因此,在选择相机或传感器时,强烈建议寻求在农业机器人集成方面有丰富经验的视觉技术合作伙伴的帮助。他们能够根据您的具体机器人类型、作业环境、运动速度和精度要求,提供最合适的相机选型与集成方案。
五、 结语:为智能农业装上“慧眼”
全局快门相机通过其“瞬间全局曝光”的特性,有效解决了农业机器人在动态环境中图像采集失真的核心难题,为精准除草、高速巡检、自动驾驶和高效分拣等应用提供了可靠的视觉保障。
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 河南省农业科学院招聘公告
- 思南创辉农业发展有限公司
- 国资拟入主!华英农业,实控人将变更
- 湘南学院生物医药研究中心亮相首届中药农业博览会──产学研协同赋能中医药产业高质量发展
- JIA|安徽农业大学稻茬小麦创新研究张文静/黄正来教授团队揭示小麦籽粒响应孕穗期低温的生理及蛋白质组学机制
- MHOrT | 南京农业大学柳李旺教授团队:萝卜RsWRKY40通过调节蔗糖积累和CBF信号途径响应低温胁迫
- 中国农业科学|河北省农林科学院联合中国农科院研究大豆生育期基因E1和E2的启动子及其表达模式
- 聚焦!潍坊市农业农村局到冶源街道调研农村集体“三资”管理和农村产权流转交易工作
- JIPB | 中国农业大学刘俊峰和彭友良教授团队设计出识别非MAX类效应蛋白的新抗瘟免疫受体
- PBJ | 中国农业科学院作科所创制"抗冻融玉米"破解冷冻食品痛点
