孙国祥副教授团队 | 设施农业自主移动装备导航技术研究进展
- 2026-07-01 14:31:51

点击蓝字 · 关注我们
01 论文基本信息
《智能化农业装备学报(中英文)》2025年第6卷第4期刊载了南京农业大学工学院 黄银锋, 孙国祥, 汪小旵, 施印炎, 章永年, 陈光宇的论文——设施农业自主移动装备导航技术研究进展。该研究由国家重点研发计划项目(2023YFD2000304);国家重点研发计划项目(2023YFD2000305);江苏省农业科技自主创新资金项目(CX(22)3097);江苏省现代农机装备与技术示范推广项目(NJ2023-44)资助。
02 引文信息
引用格式如下,欢迎大家阅读、引用。
黄银锋, 孙国祥, 汪小旵, 施印炎, 章永年, 陈光宇. 设施农业自主移动装备导航技术研究进展[J]. 智能化农业装备学报(中英文), 2025, 6(4): 1-16.
HUANG Yinfeng, SUN Guoxiang, WANG Xiaochan, SHI Yinyan, ZHANG Yongnian, CHEN Guangyu. Research progress in navigation technology for autonomous mobile equipment in facility agriculture[J]. Journal of Intelligent Agricultural Mechanization, 2025, 6(4): 1-16.
DOI: 10.12398/j.issn.2096-7217.2025.04.001

★
点击知网阅读
★
★
点击官网阅读(全文,免费)
★
03 论文研究内容
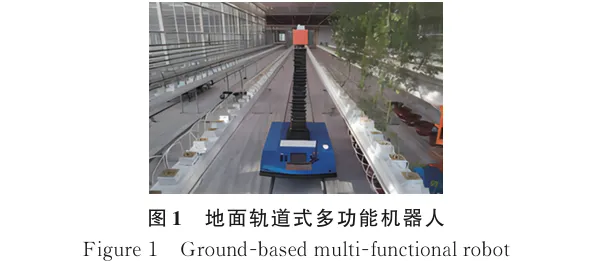
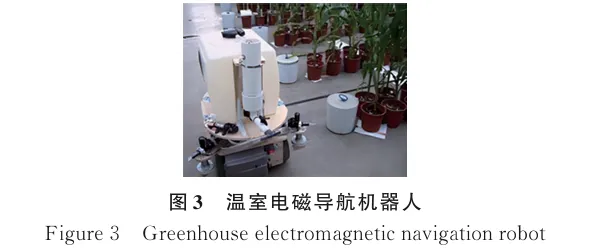
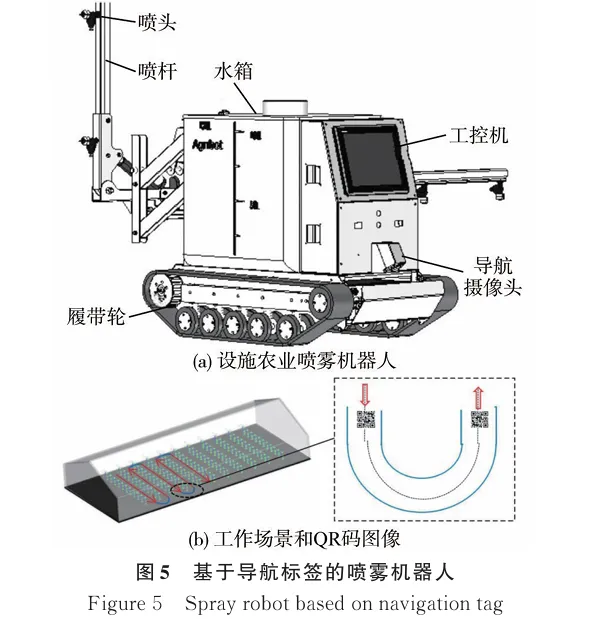
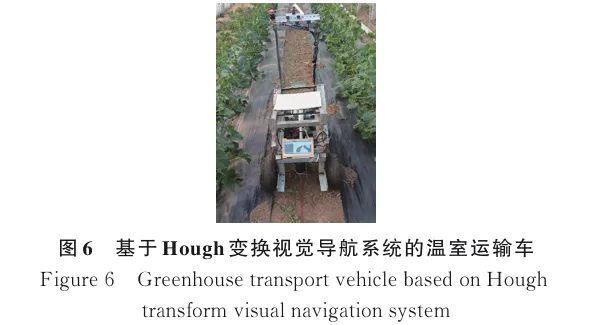
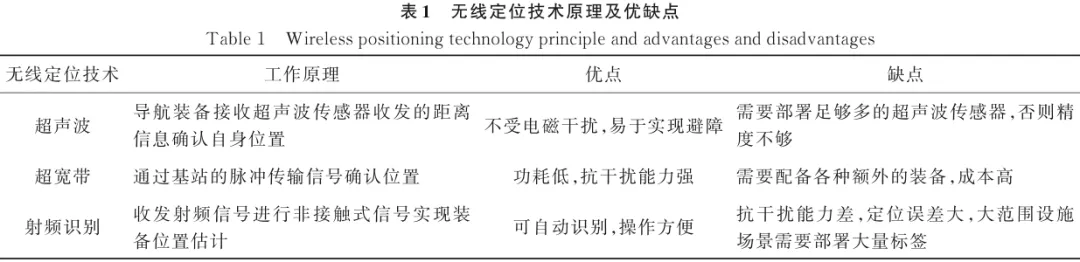
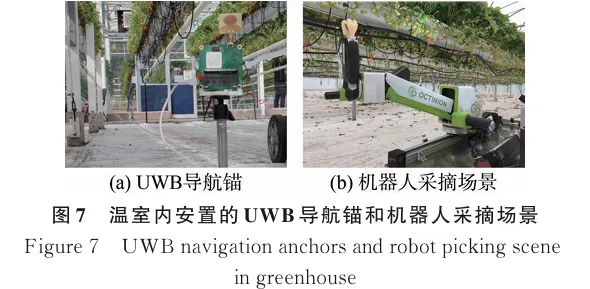
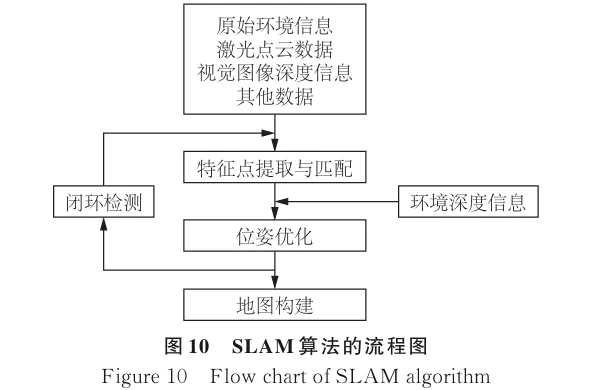
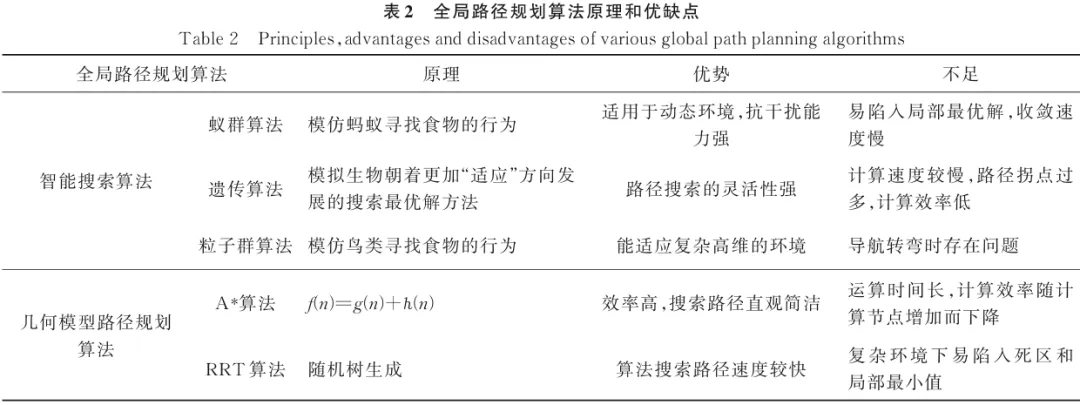
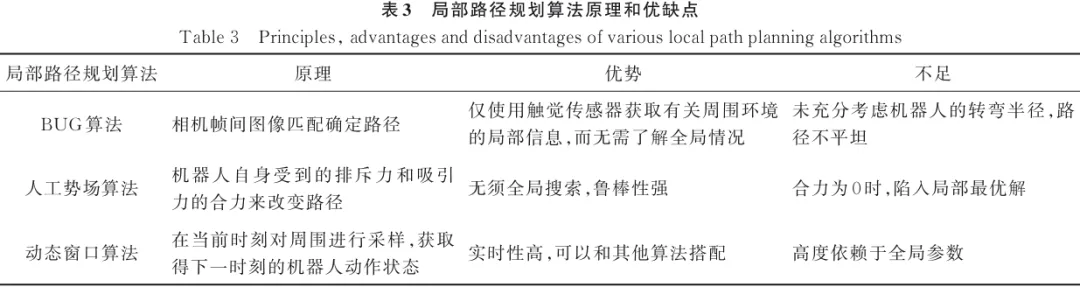
摘要:设施农业自主移动装备导航技术的研发对于设施农业的智能化升级具有举足轻重的意义,其面临的核心挑战在于如何在设施场景内部实现安全、高效和精确的移动。通过深入剖析国内外最新的研究动态,本研究旨在全面阐述设施农业自主移动装备导航技术的发展脉络,并探讨其未来的发展趋势。首先梳理了设施农业自主移动装备导航技术的研究现状,重点分析了不同导航方式的优缺点,包括导轨式、循迹式以及基于实时定位与地图构建(simultaneous localization and mapping,SLAM)技术的多源数据融合导航。在此基础上,进一步探讨了基于SLAM技术的多源数据融合导航在实时定位、地图构建以及路径规划等方面的最新研究进展。相关研究表明,传统的导轨式和循迹式导航方式虽然简单易行,但存在路线固定、安装成本高、作业范围受限等问题。相比之下,基于SLAM技术的多源数据融合导航则具有更高的灵活性和自主性,能够实现精准定位、智能避障以及自适应路径规划等功能,因此在设施农业自主移动装备领域具有广阔的应用前景。随着SLAM技术的不断发展和完善,基于多源数据融合导航的设施农业自主移动装备将迎来更加广阔的发展空间。同时,本研究也关注到这些技术在实际应用中可能存在的挑战和限制,如数据处理能力、算法优化等问题。最后,对我国设施农业自主移动装备导航技术的研发提出了几点展望:采用多源数据融合式导航技术,实现高精度定位与地图构建;引入人工智能、云计算与边缘计算等技术,提升自主移动装备对于复杂设施场景的识别和理解能力;通过全局路径规划和局部路径规划相结合,实现自主移动装备的自主决策和路径规划;通过智能避障技术,提高自主识别和避让障碍物能力,确保作业过程中的安全性与可靠性;深入研究多机协同、人机协同的自主移动装备,实现多任务协同作业,提升装备适用性和作业效率。该研究旨在为我国设施农业自主移动装备智能化发展提供有益的参考和借鉴。
关键词:设施农业, 导航, 自主移动装备, 实时定位, 地图构建, 路径规划
Abstract: The development of navigation technologies for autonomous mobile equipment is pivotal to the intelligent upgrading of facility agriculture, with its core challenge being how to achieve safe, efficient, and precise movement within greenhouse environments. Through an in-depth analysis of the latest research trends, this study aims to comprehensively elucidate the evolution of these navigation technologies and discuss their future directions. We begin by reviewing the state of the art, with a focus on comparing the advantages and disadvantages of different navigation methods, including guide-rail, path-tracking, and multi-source data fusion navigation based on simultaneous localization and mapping (SLAM) technology. Furthermore, we explore recent advances in SLAM-based multi-source data fusion navigation for real-time localization, mapping, and path planning. Relevant research indicates that while traditional guide-rail and path-tracking methods are simple to implement, they suffer from fixed routes, high installation costs, and limited operational range. In contrast, SLAM-based multi-source data fusion navigation offers greater flexibility and autonomy, enabling precise localization, intelligent obstacle avoidance, and adaptive path planning, thus holding broad application prospects in facility agriculture. As SLAM technology continues to mature, equipment employing this navigation approach will see even wider adoption. This study also addresses practical challenges and limitations, such as computational demands and algorithm optimization. Finally, we propose several development prospects for China's facility agriculture: adopting multi-source data fusion navigation to achieve high-precision localization and mapping; integrating artificial intelligence, cloud computing, and edge computing to enhance the equipment's perception and understanding of complex environments; combining global and local path planning to enable autonomous decision-making; implementing intelligent obstacle avoidance to ensure operational safety and reliability; and investigating multi-vehicle and human-vehicle collaboration for efficient multi-task coordination. This research aims to provide valuable insights and references for the intelligent development of autonomous mobile equipment in Chinese facility agriculture.
Keywords: facility agriculture, navigation, autonomous walking equipment, real-time positioning, map construction, path planning
04 作者简介
通信作者

孙国祥,男,江苏建湖人,南京农业大学副教授,硕士生导师。2016年在南京农业大学工学院获得农业电气化与自动化专业博士学位,主要从事设施农业智能化技术与装备研究,方向涉及计算机视觉技术、高通量植物表型测量技术、农业机器人场景感知技术等,主持、参与国家重点研发计划项目子课题、江苏省自然科学基金、国家自然科学基金、江苏省重点研发计划项目、江苏省农业科技自主创新资金项目等项目。在国内外核心学术期刊发表学术论文50余篇,其中以第一作者发表论文28篇(SCI、EI论文20篇),入选2025全国高被引学者TOP 1%,已授权国家发明专利17项、实用新型专利16项、计算机软件著作权6项,参编十四五高等教育教材1部,科研成果获教育部技术发明奖二等奖1项(排名3/6)、江苏农业科技奖二等奖1项(排名3/10)、江苏农机工业科技发明奖一等奖1项(排名3/10)等奖项。联系邮箱:sguoxiang@njau.edu.cn。
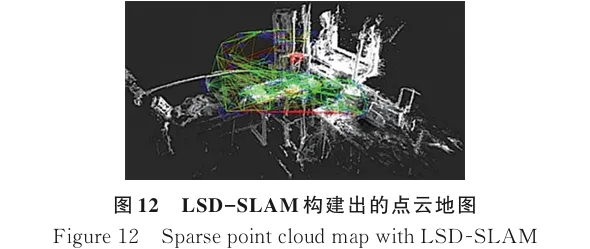
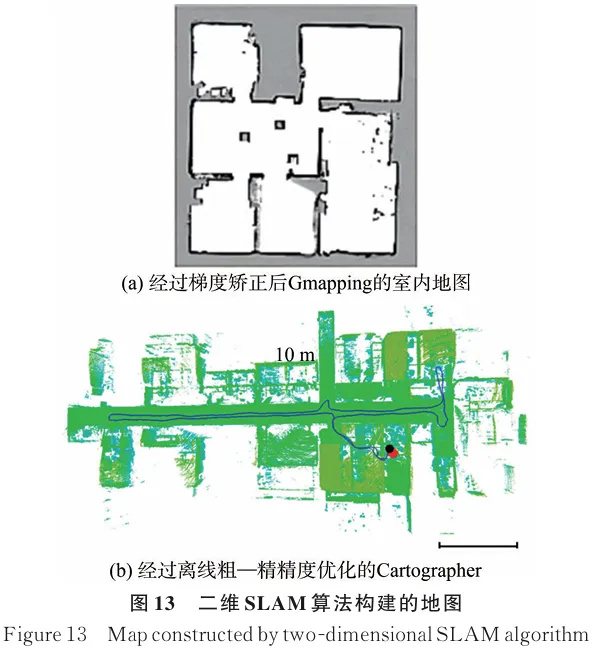
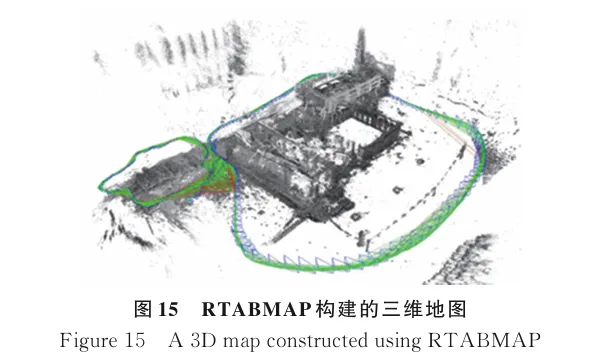
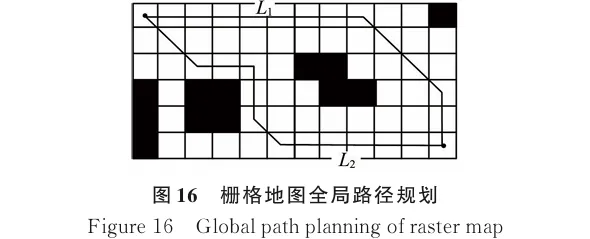
05 文章图表





今日推荐

公众号征集和期刊征稿
本公众号诚邀农业工程领域同仁投稿,重点征集创新科研成果(含技术突破与应用案例)、展会及学术会议宣传(预告与深度报道)、科技论文及书籍权威推介、科技工作者学术成就展示、科研团队招贤 / 招生信息,以及行业政策动态、技术趋势等热点资讯。同时,《智能化农业装备学报(中英文)》期刊针对农业智能化方向长期征稿,详情可致电联系15366092883 (微信同号)咨询。
《智能化农业装备学报(中英文)》是经国家新闻出版署批准,中华人民共和国农业农村部主管、农业农村部南京农业机械化研究所主办的农业工程类学术期刊。中国工程院罗锡文院士担任编辑委员会主任委员。收录平台:CSCD来源期刊、中国科技核心期刊、中国农林核心期刊、CAB Abstracts、EBSCO数据库等。
国内统一刊号:CN 32-1887/S2
国际标准刊号:ISSN 2096-7217

期刊网站:http://znhnyzbxb.niam.com.cn联系电话: 025-84346292电子邮箱: jiam@caas.cn
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 高考地理九大农业技术的应用!值得收藏!
- 商务部、农业农村部等6部门《关于更好服务实体经济推进电子商务高质量发展的指导意见》
- 金浦供应链&禾美农业-04月07日包子、面包、面粉、淀粉、牛奶检测报告
- 华南农业大学第三届校花校草大赛
- 2026年东北农业大学硕士研究生调剂公告
- 金浦供应链&禾美农业-04月07日大米、糖、盐、油检测报告
- 金浦供应链&禾美农业-04月07日蛋类、酱腌菜、肉类、蔬菜、水豆腐、鲜湿淀粉条检测 报告
- 农业IP打造六级修炼:从0到1全流程落地,经典收藏!
- 金浦供应链&禾美农业-04月07日干货类(粉丝、虾米、干贝、黑凉粉、红枣)检测报告
- 健全农业信贷制度体系,提升农村基础金融服务水平,将有哪些投资机会、利好哪些股票?
