苗中华等:具身智能农业机器人关键技术与发展趋势
- 2026-07-06 07:21:08
具身智能农业机器人关键技术与发展趋势
苗中华 1,朱子煜 1,张伟 1,薛振锋 1,孙腾 1,张异凡 1,谢涛 1,何创新 1,李楠 1,苑进 2 ,赵春江 3 ,刘成良 4
(1.上海大学机电工程与自动化学院,上海 200444;2.山东农业大学机电工程学院,泰安 271018; 3.北京农林科学院,北京 100097;4.上海交通大学机械与动力工程学院,上海 200072)
摘要:全球农业智能化转型背景下,传统农业机器人面临非结构化环境、作业对象不确定性及控制参数时变等技术瓶颈,导致农业机器人实用效果差,产业化落地困难。具身智能作为实现通用人工智能的关键路径,为突破上述瓶颈提供了新范式。本文系统阐述具身智能理论驱动的农业机器人技术体系与发展路径,创新性构建“感知-决策-模拟-进化-诊断”五位一体研究框架。具体而言:具身感知聚焦开放环境场景理解、作业目标主动感知及多模态融合感知;具身决策涵盖端到端导航、大模型驱动的机械臂操作及多机协同算法;具身模拟着力于高保真场景重建、生成及虚实迁移技术;具身进化整合无监督学习、强化学习及模仿学习机制;具身诊断构建作业状态监测与质量评估体系。最后,展望未来发展方向,为农业 4.0 时代的农业机器人智能化升级提供理论支撑与技术路线。
关键词:农业机器人;具身智能;基础模型;大语言模型;多模态感知;强化学习
知网阅读
文章图片
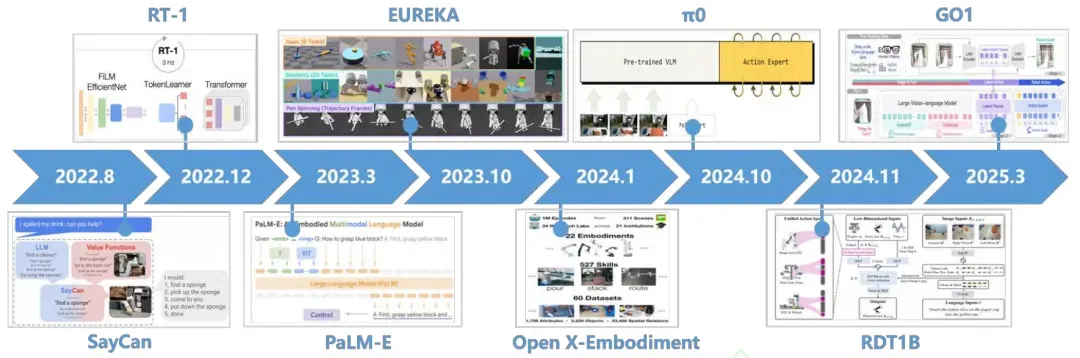
图 1 近年来具身智能领域的代表性成果
Fig.1 Representative achievements in the field of embodied intelligence in recent years
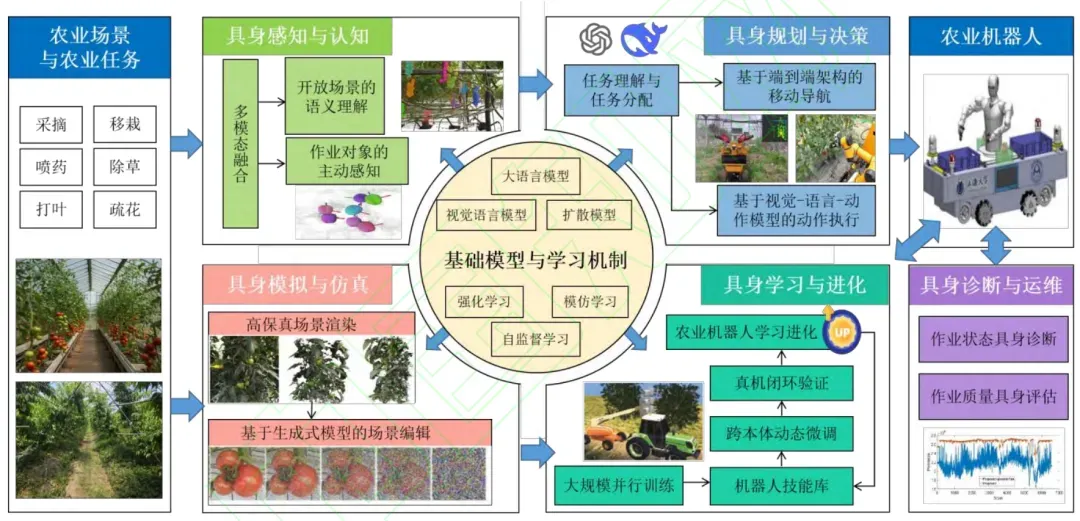
图 2 具身智能农业机器人研究范式
Fig.2 Research paradigm for embodied intelligent agricultural robots

图 3 农业作物不同程度受遮挡示例
Fig.3 Examples of Agricultural Crops with Varying Degrees of Occlusion
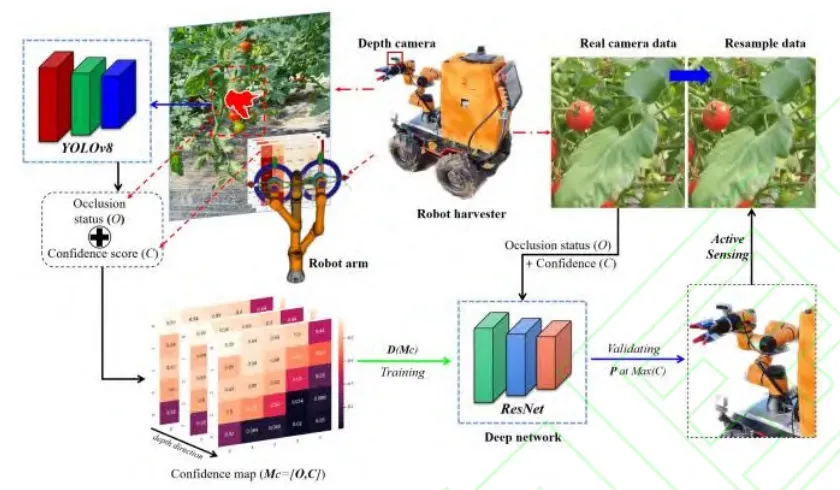
图 4 基于启发式的主动感知方法
Fig.4 Heuristic-based active perception method
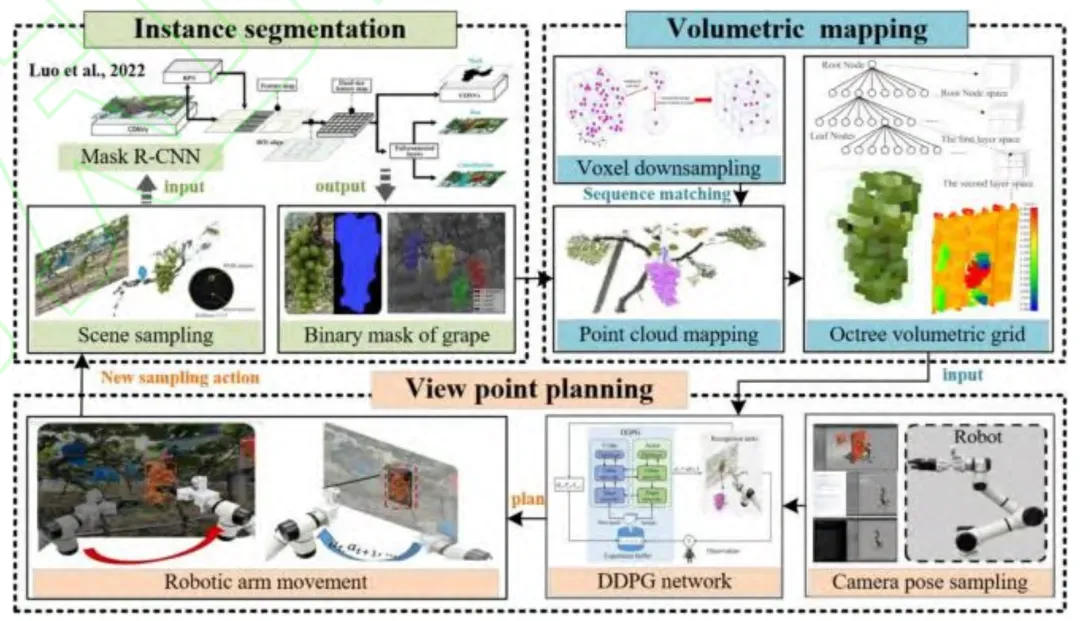
图 5 动态调整相机视角实现主动感知
Fig.5 Active perception through Dynamic Camera Viewpoint Adjustment
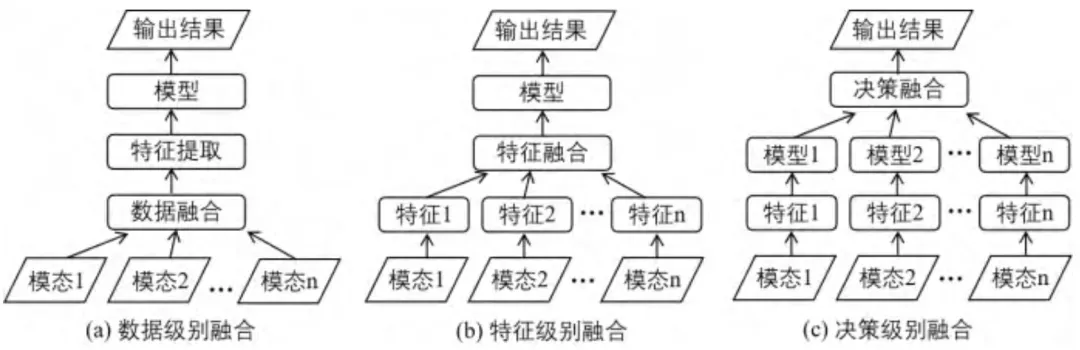
图 6 三种多模态信息融合架构
Fig.6 Three multimodal information fusion architectures
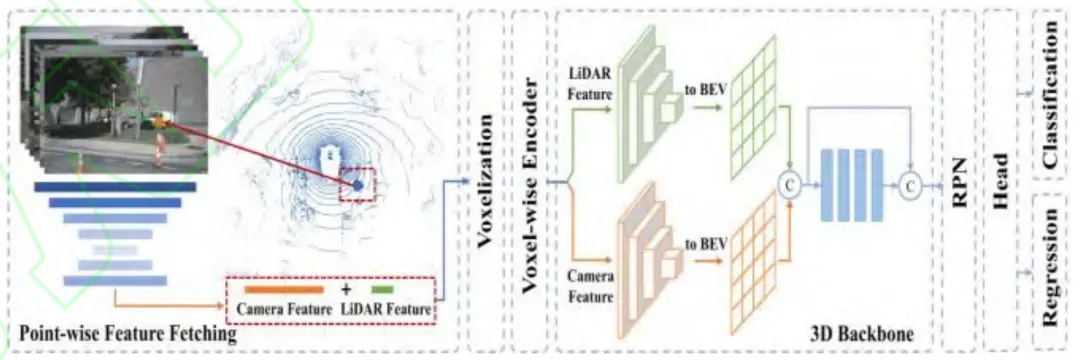
图 7 特征级别融合示意图
Fig.7 Feature level fusion schematic diagram
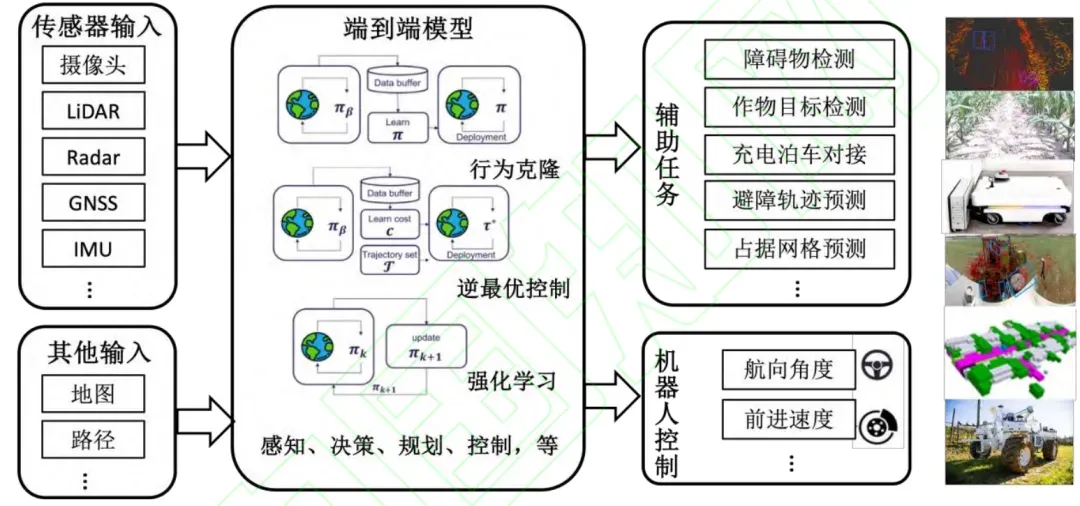
图 8 端到端导航架构图
Fig.8 End to end navigation architecture diagram
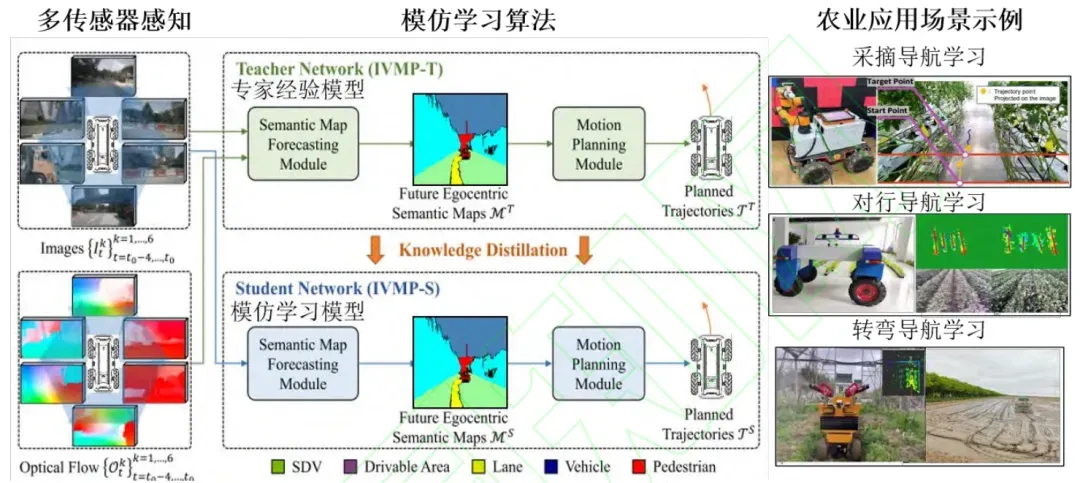
图 9 基于模仿学习的农业机器人应用示例
Fig.9 Application examples of agricultural robots based on imitation learning
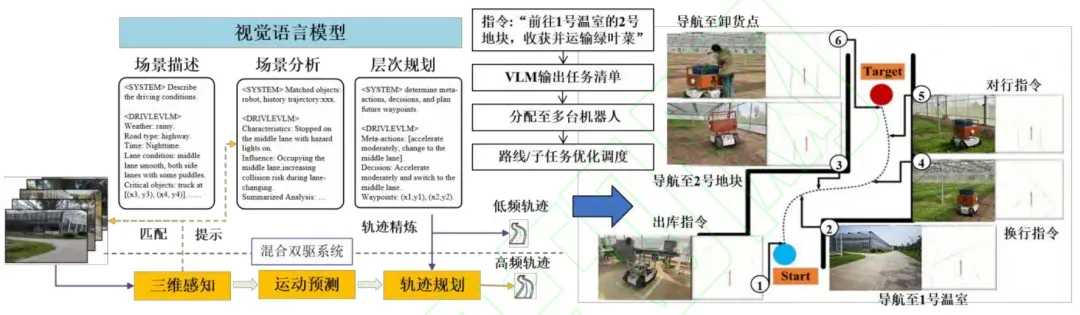
图 10 基于视觉-语言模型的导航应用示例
Fig.10 Example of vision language model based navigation application
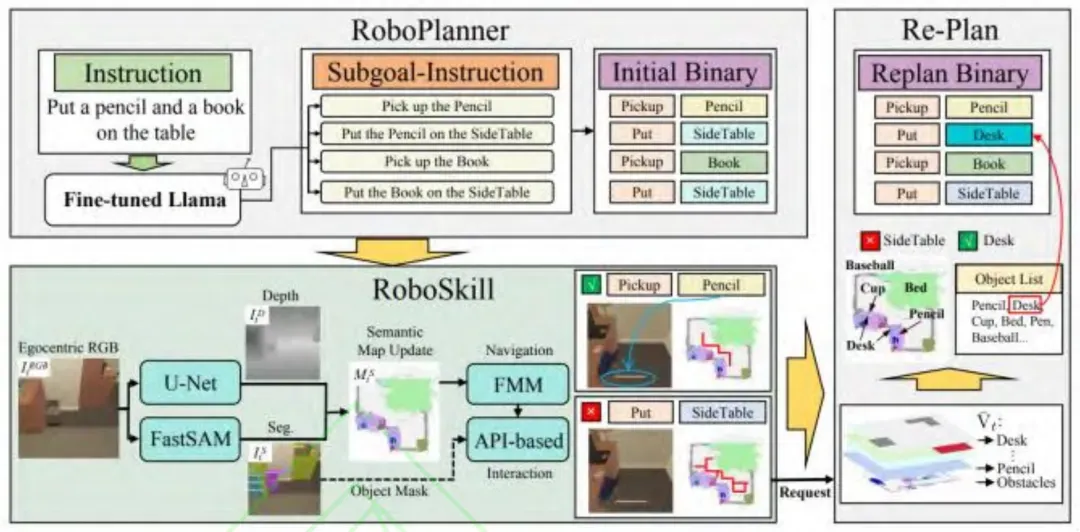
图 11 LLM 与经典任务规划相结合示例
Fig.11 Example of combining LLM with classic task planning
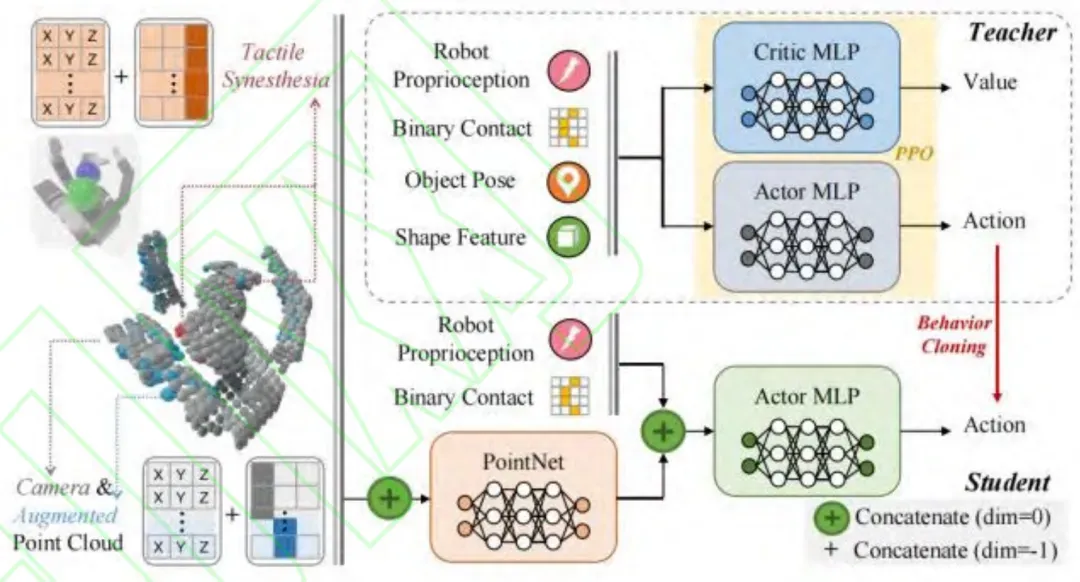
图 12 基于点云的触觉表示方法
Fig.12 A tactile representation method based on point cloud

图 13 智慧农业多机器人任务分配与调度示意图
Fig.13 Schematic diagram of task allocation and scheduling for multiple robots in smart agriculture
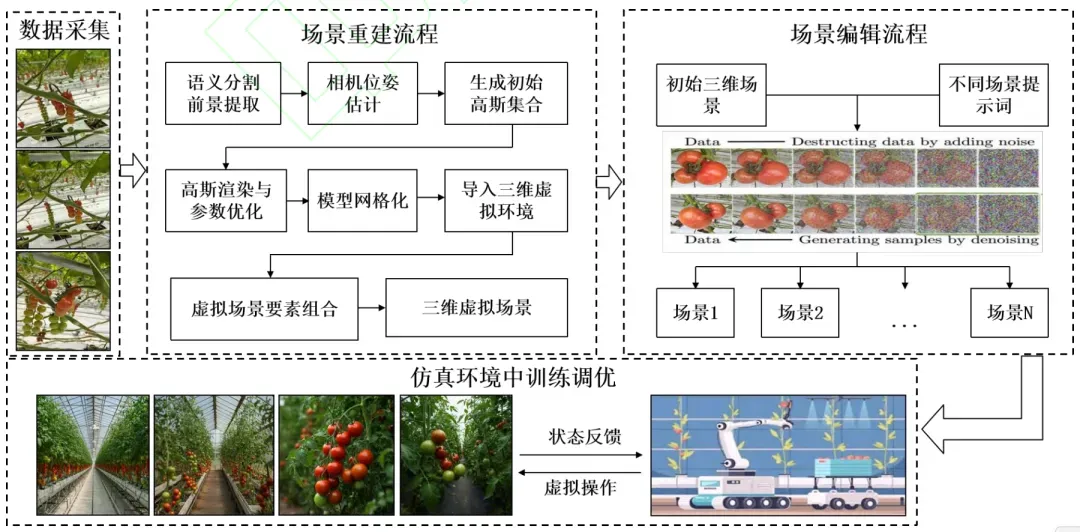
图 14 具身模拟与生成的技术路线
Fig.14 Technical roadmap for embodied simulation and generation
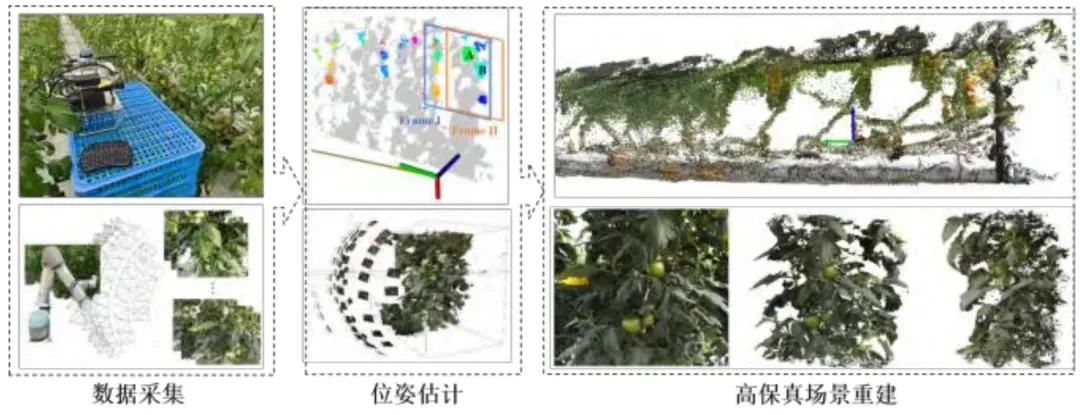
图 15 农业场景高保真场景重建流程
Fig.15 High fidelity scene reconstruction process for agricultural scenes
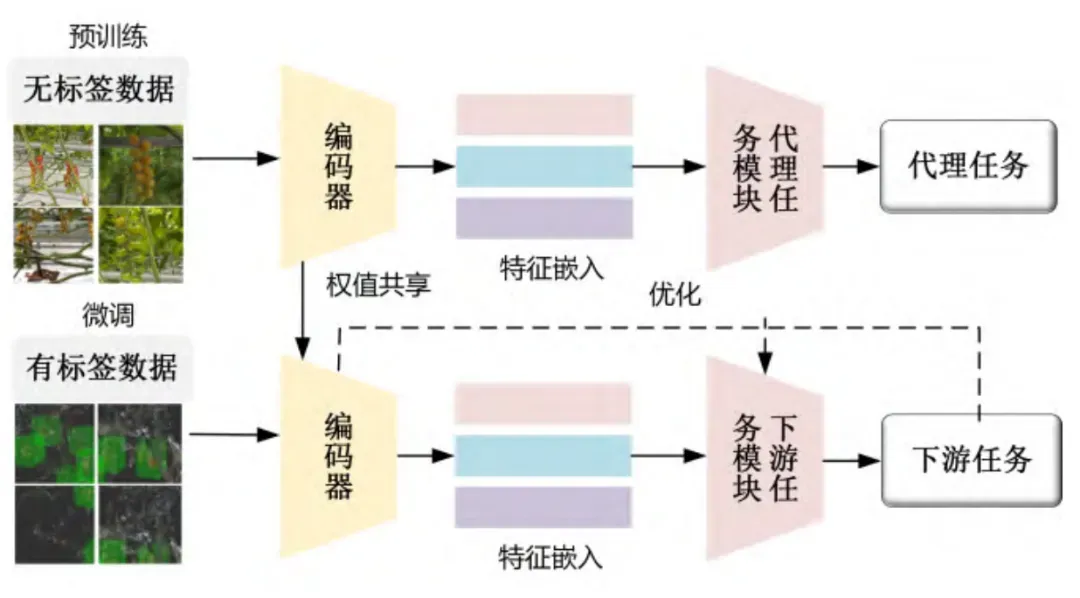
图 16 自监督学习原理图
Fig.16 Principle diagram of self supervised learning
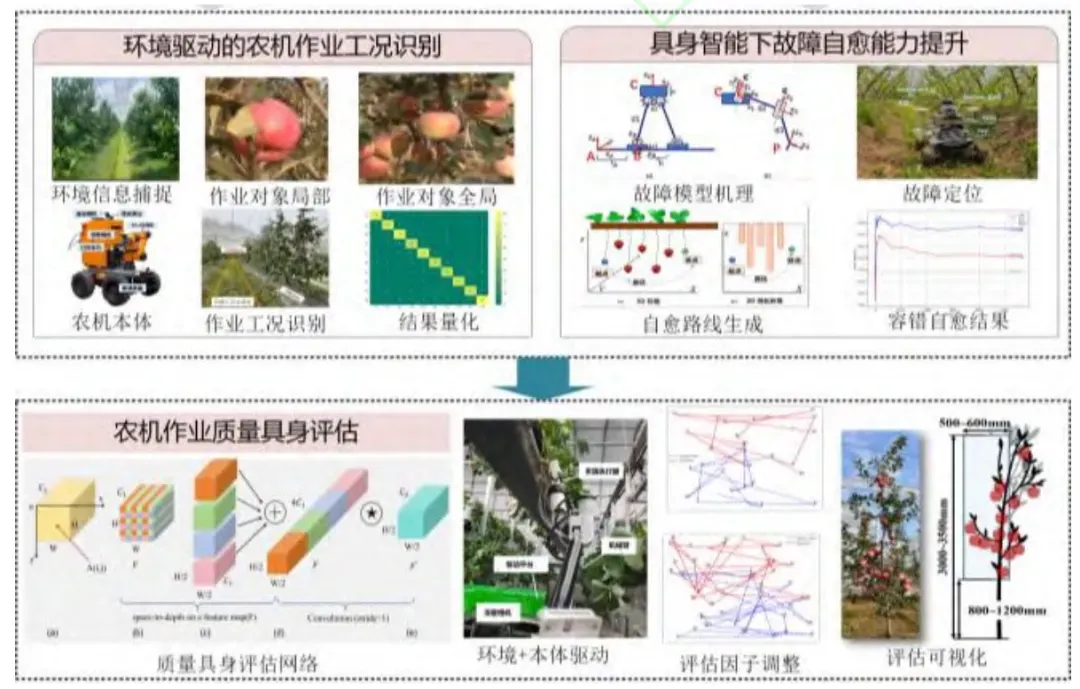
图 17 农业机器人具身诊断与运维关键技术
Fig.17 Key technologies for body diagnosis and operation of agricultural robots
随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 几内亚启动2026-2027农业季,大手笔投入冲刺粮食自给,中企合作迎新机
- 重庆市农业学校2026年3+2大专班和高考升学班招生简章
- 1500万!中国农业科学院油料作物研究所新品种签约转让
- 一书一世界·阅读即远行丨内蒙古农业大学图书馆2026年校园读书月系列活动“一书一世界,阅读即远行”主题系列书展
- 追寻红色足迹 缅怀革命英烈|临沧市农业学校开展 “ 追寻・2026・清明祭英烈”祭扫活动
- 农业职称评审到底难不难?看完这篇全明白
- 中国农业大学-抗皮肤衰老功能大鲵胶原三肽
- 具身智能在农业领域的应用:现状、挑战与未来
- 【评审公告】2025年度深圳市农业职称评审申报中
- 打造品牌农业、品质文旅
