在智慧农场的底层架构中,土地不再是泥土、水分和有机质的简单物理堆叠,而是被抽象为一个由无数个 X, Y, Z 三维坐标点与时间轴 T 构成的“多维时空数据张量”。
智慧农业的本质,是一场将不可控的自然环境,转化为高精度机器指令的“翻译运动”。支撑这场浩大工程的,是被称为“时空技术底座”的核心架构。这个底座由高精度 GNSS 网络提供绝对物理标尺,由多重异构网络构建传输神经,最终由具备 GeoAI 与硬核空间算法的 GIS 引擎完成指令编译,并经由 ISOBUS 协议下发至机电底层。
第一章:绝对位置感知层——GNSS物理学与硬件生态的解构
要让几十吨重的钢铁巨兽在广袤农田中实现交接行误差 < 2.5 厘米的穿梭,首先需要建立一套极度严密的底层物理标尺。
1. 从“伪距”到“载波相位”的物理学跃迁
悬挂在中高轨道(MEO)的导航卫星(北斗、GPS),本质上是高精度的“太空原子钟”。传统单点定位使用的是伪距测量(Pseudorange),即通过测距码计算电磁波从卫星到达接收机的时间差。由于测距码波长较长(如 GPS L1 C/A 码波长近 300 米),且信号穿过电离层时会产生不可预测的折射延迟,其物理极限误差被死死锁在米级。这对于精准农业而言是毫无价值的。
RTK(实时动态差分)彻底抛弃了伪距,转而测量卫星信号的“载波相位(Carrier Phase)”。
毫米级物理刻度: 以 L1 频段为例,其载波波长仅为 19 厘米左右。接收机通过高频追踪这 19 厘米波长上的相位变化,相当于用一把刻度极细的游标卡尺去测量太空到农田的距离。
整周模糊度解算(Ambiguity Resolution): 接收机必须解算出卫星到天线之间到底包含了多少个完整的波长(即整周模糊度)。系统通过引入已知坐标的基准站(Base),基准站与流动站(Rover)同时观测相同卫星,建立双差观测方程(Double Difference)。这一数学相减过程,直接将电离层延迟、对流层折射和卫星钟差等公共误差项彻底抵消,从而在数秒内锁定整周模糊度,实现厘米级的“固定解(Fix)”。
2. 硬件架构的平权:Linux 与开源引擎的逆袭
在这个感知层中,曾经存在着极深的技术护城河。Trimble(天宝)、John Deere 等巨头依靠专有的 ASIC 底层芯片(如 Maxwell 架构)垄断了抗多径与解算算法。
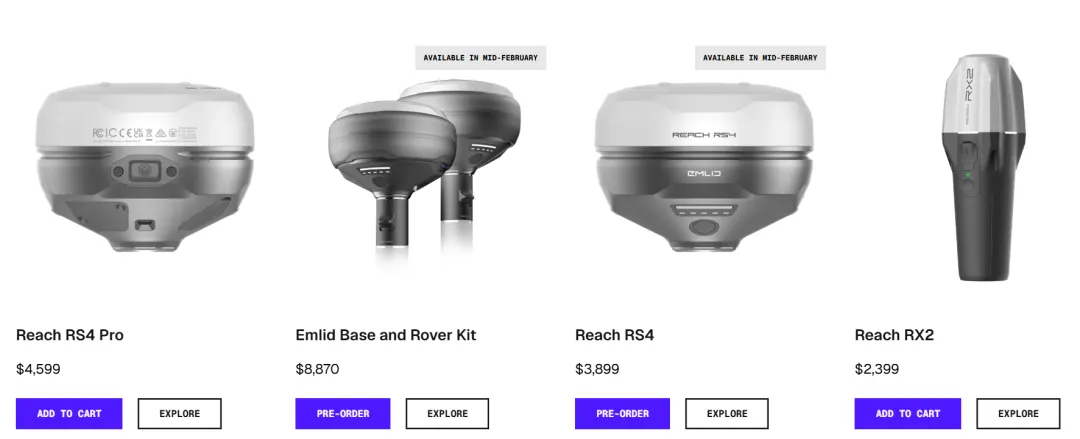
然而,以 Emlid 为代表的新锐力量,通过“软件定义硬件”彻底重构了生态规则:
绕过芯片壁垒: Emlid 不再死磕昂贵的专有基带芯片,而是采用高性价比的通用多频段 GNSS 射频前端,将极其消耗算力的卡尔曼滤波(Kalman Filter)矩阵运算和模糊度解算,交由底层深度定制的 Linux 系统与开源 RTKLIB 引擎完成。
柔性时空节点: 这种底层架构的解耦,让农田里的接收机变成了一个通用的“柔性节点”。它打破了传统农机导航“出厂即定死”的黑盒。技术人员可以在 Emlid Flow 软件中,将其瞬间配置为 NtripClient(接收云端数据)、本地广播基站,甚至在航测时配置为静态记录模式,静默生成通用的 RINEX 观测文件以供后期 PPK(动态后处理)解算。
3. 基础设施的重构:大疆(DJI)的天空端闭环与 3D 泛在感知
在前两点中,无论是传统巨头还是开源新锐,其感知逻辑大多建立在“二维地面”与“依赖第三方差分网络”的基础上。而大疆(DJI)则从天空端发起降维打击,在感知层硬生生砸出了一条“重资产、全闭环”的异类路线。
影子 CORS 与 D-RTK 专属网络: 大疆没有将底层命脉交托给公共的商业 CORS 网络(如千寻位置)。依托其庞大的植保机群保有量,大疆在底层构建了一张极其庞大的专属 D-RTK 网络。通过自建移动基准站(D-RTK 2)与农服云端解算,设备开机即可接入专属高速通道。这种底层基础设施的自给自足,不仅将获取厘米级差分数据的握手延迟压缩至极限,更构建了一道极高的生态护城河。
对抗高速三维盲区的紧耦合感知: 地面拖拉机的时速通常在 10 公里以内,而大疆植保无人机(如 T60)却要在布满电线、树枝的复杂三维空间中,以 10 米/秒(36 公里/小时)的速度极速穿梭。面对果园树冠遮挡导致 RTK 瞬间降级为浮点解(Float)的致命风险,单一的 GNSS 绝对无法胜任。 大疆在感知层引入了多源异构传感器的极度紧耦合。它将 RTK 提供的绝对时空锚点,与机身搭载的有源相控阵雷达(Active Phased Array Radar)及双目视觉传感器进行底层融合。在 RTK 信号因遮挡而断崖式衰减的毫秒间,雷达与视觉里程计瞬间接管高度与姿态控制,实现无缝的“三维仿地飞行(Terrain Follow)”。大疆在底层证明了:在极致的立体空间中,感知层必须从单一的卫星坐标,向多源异构的 3D 泛在感知进化。
DJI 大疆全球总部“大疆天空之城”(深圳南山)
第二章:异构数据传输层——跨越旷野的通信与边缘计算博弈
有了绝对坐标,时空底座面临的最致命挑战浮出水面:在没有光缆、甚至没有 4G 基站的旷野中,如何维持厘米级差分数据的高频、低延迟流转?
1. NTRIP 协议与 RTCM 比特流解析
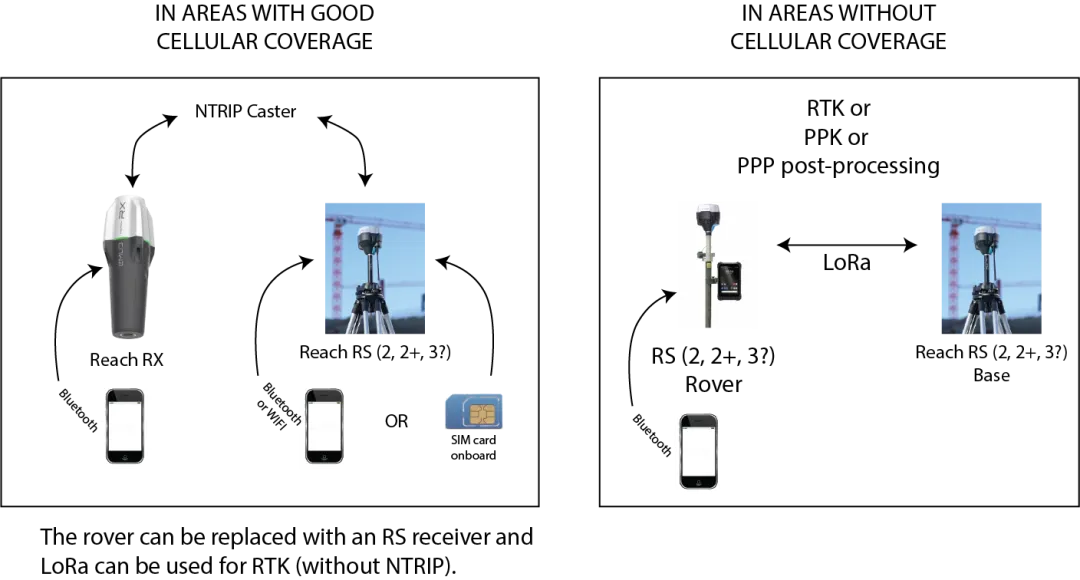
在网络覆盖良好的农区,NTRIP 协议(Networked Transport of RTCM via Internet Protocol) 是目前的数据高速公路。
底层报文: 农机通过 TCP/IP 握手后,接收的并非简单的坐标数字,而是 RTCM 3.2 MSM(多信号消息) 格式的二进制数据流。一个 MSM 数据包内,高频打包了基准站观测到的多星座卫星的伪距、载波相位和多普勒频移原始数据。
网络脆弱性: NTRIP 极度依赖移动网络的稳定性。在真实的农田场景中,毫秒级的网络抖动或丢包,都会导致农机 RTK 引擎的数据链断裂,状态从 Fix 降级为 Float(浮点解),进而导致拖拉机液压方向盘剧烈画龙。
2. LoRa 物理层:CSS 调制与时空局域网突围
当公网瘫痪,时空底座必须拥有底层的独立组网能力。Emlid 等设备内置的 LoRa(长距离低功耗无线射频) 展现了物理层面的降维打击。
CSS 扩频调制: 与传统极易受地形干扰的 UHF 电台不同,LoRa 在物理层采用了 Chirp Spread Spectrum(线性调频扩频) 调制技术。这种源自军方雷达的技术,通过将信号能量扩展到极宽的频带上,使其能够在信噪比极低(甚至低于环境底噪)的情况下被成功解调。
农田实战: 这意味着在植被茂密的果园或有丘陵遮挡的复杂农田中,农场主只需在一处高地架设基站,无需一张 SIM 卡,就能硬生生砸出一个覆盖半径 8-10 公里的高精度、抗干扰的时空局域网。
3. 星链(Starlink)与 MEC 边缘计算的重塑
当农场规模达到数十万亩的真正无人区,LoRa 的覆盖物理天花板显现,低轨宽带星座(LEO)成为了终极补天方案。
拓扑结构的颠覆: 星链在此刻并非充当导航卫星,而是彻底改变了农业机群的网络拓扑。当大型复式作业拖拉机搭载 Starlink Mini 终端后,它实质上变成了一个拥有百兆带宽的移动边缘计算(MEC)节点。
双向高频流转: 农机不再是一座等待差分信号的孤岛。它不仅能通过星链的 TCP/IP 隧道完美运行 NTRIP 协议拉取 RTCM 数据流,更能将拖拉机底层数百个 CAN 总线传感器(发动机扭矩、液压压力、实时排种量)的高频时间序列数据,以微秒级延迟反向推送到云端 GIS 引擎。旷野与云端数据中心的物理鸿沟,被彻底抹平。
第三章:时空张量运算层——GIS 的深水区与算力枢纽
当高精度的厘米级坐标 X, Y, Z 与海量传感器数据通过星链或 5G 汇聚到数据中心,时空底座的“参谋部”——GIS 引擎(地理信息系统)开始运转。在工业级智慧农业架构中,GIS 绝不是用来“看地图”的前端面板,它是处理时空张量、统筹深度学习、调度底层数据库的超级算力枢纽。
1. ArcGIS Pro:企业级时空张量与 GeoAI 预测中枢
从 2D 栅格到 3D 体素(Voxel Layers): 真实的土壤环境不是一张二维的纸,而是深达数米的三维空间。作物根系的吸水和养分运移发生在地下不同深度的土壤圈层。ArcGIS Pro 引入了原生的体素架构,并结合 3D 经验贝叶斯克里金(3D EBK) 插值算法。它可以将分布在不同深度的土壤传感器点阵,通过马尔可夫链蒙特卡洛(MCMC)模拟,插值为一个长、宽、深具备的“数据立方体”。这使得农场技术团队可以直接在 3D 场景中“切片”,剖析地下 40 厘米处硝态氮随地下水流失的三维动态过程。
时空立方体(Space-Time Cube)与模式挖掘: 农业数据的最高维度是时间 T。ArcGIS Pro 能够将过去十几年的高光谱卫星影像(如 Sentinel-2)和气象网格数据,构建为时间-空间联合张量。结合新兴热点分析(Emerging Hot Spot Analysis)和随机森林算法,系统能计算出某地块的病害是“持续热点(连续数年爆发)”还是“新发热点(今年突发)”。
GeoAI 的全链路集成: ArcGIS Pro 内部深层封装了底层深度学习框架(如 PyTorch)。导入无人机正射影像后,直接挂载 Mask R-CNN 等计算机视觉模型。系统不仅能计算宏观的植被指数,更能进行实例分割(Instance Segmentation)——在数千万株作物中,精准勾勒出单棵杂草的非规则多边形,直接生成只针对这几株杂草的“毫米级靶向喷药处方”。
esri总部 (美国加州洛杉矶)
2. QGIS:全栈算法总线与空间数据库底座
对于农业科技极客、算法工程师与初创公司,开源的 QGIS 则是一套敏捷、无限可扩展的“底层算法总线”。
挂载重型科学计算库: QGIS 的处理工具箱(Processing Toolbox)底层直接挂载了 SAGA GIS、GRASS 等硬核计算引擎。例如,在研究局部微地形积水、指导排灌时,专家会调用 SAGA 的矩阵迭代,计算极具农学指导意义的地形湿度指数(Topographic Wetness Index, TWI),通过对高精度 DEM(数字高程模型)的微积分运算,QGIS 能够精准锁定农田中水分最容易富集的高危涝灾区。
PostGIS 并发算力与无头自动化(Headless): 当面对十几年积累的数十亿个拖拉机轨迹点时,QGIS 作为前端,直接连接 PostgreSQL/PostGIS 空间关系型数据库。开发者不再点击界面,而是写入诸如 ST_Intersects、ST_Buffer 的空间 SQL 函数,让服务器集群瞬间完成上亿个轨迹点与地块边界的相交查询。在现代农业 SaaS 平台中,QGIS 甚至通过命令行接口(如 qgis_process)作为后台的无头渲染引擎静默运行,实现从“数据摄入”到“处方图导出”的零人工干预。
3. 空间拓扑的绝对铁律:DE-9IM 模型
无论使用何种 GIS 引擎,要将空间数据下发给几十吨重的无人驾驶农机,必须在底层执行冷酷的空间拓扑规则。GIS 在底层使用 DE-9IM(九交模型,Dimensionally Extended nine-Intersection Model) 来约束所有几何实体的逻辑。
第四章:底层机电协议层——打破巴别塔的 ISOBUS
至此,时空底座已经通过 GIS 算出了在坐标 (X, Y) 处应该施用 50 克化肥。但最致命的脱节往往发生在这里:电脑里的软件,如何命令现实中拖拉机尾部挂载的排种器电机恰好达到指定转速?
过去,各大农机巨头(如采埃孚、博世、约翰迪尔)使用各自私有的 CAN 总线协议,导致 A 品牌的拖拉机无法控制 B 品牌的播种机,数据孤岛宛如“巴别塔”。而打碎这座高塔的,正是时空底座的最后一块拼图——ISOBUS(ISO 11783 国际标准)。
1. 任务控制器(Task Controller)架构
全球顶级智慧农业的控制流,已被 ISOBUS 全面接管。它不仅规范了拖拉机与农具物理连接的 9 针插头,更严密定义了底层的报文与控制逻辑。在 ISOBUS 架构中,核心的算力枢纽是 TC(Task Controller):
2. ISO-XML:时空处方图的终极编译形态
QGIS 或 ArcGIS 最终导出的,不再是容易丢失属性的陈旧 Shapefile,而是层级极其严密的 ISO-XML 格式文件压缩包。
在这个 XML 结构中:
3. 毫秒级的机电闭环(The Electromechanical Loop)
当这个 ISO-XML 任务包被加载到拖拉机驾驶舱内的 ISOBUS 虚拟终端(VT)时,真正的魔法开始上演:
坐标捕获: 车顶的 Emlid(或其他 GNSS 接收机)以 10Hz 或 20Hz 的超高频,将 RTK 厘米级坐标推给 TC-GEO 模块。
空间碰撞检测: TC-GEO 模块在毫秒间计算出,当前拖拉机后方第 12 号排种器的物理坐标,恰好切入了 ISO-XML 定义的 1 号高产网格。
报文下发: TC-GEO 瞬间通过 ISOBUS 的底层 CAN 总线,向挂载农具的 ECU(电子控制单元) 广播一条标准的“设定点(Setpoint)”控制报文。
物理执行: 第 12 号排种器的步进电机接收到报文,毫秒级提高转速,多落下了两粒种子。
从太空 2 万公里外卫星发送的电磁波,到云端 GIS 服务器中复杂的克里金插值矩阵,再到 ISOBUS 底层 CAN 总线上的十六进制报文,终于在这一刻,化为了泥土深处精确落下的一粒种子。
第五章:穿越物理遮挡——多源异构融合与泛在感知
前两卷的 RTK 与星链再强大,都建立在一个脆弱的前提下:天线必须能“看”到天空。
在真实的农业场景中,诸如高密植的苹果果园、郁闭的橡胶林,甚至高秆玉米地的晚期,浓密的树冠会引发极度严重的多径效应(Multipath Effect)和信号衰减。GNSS 信号在这里会被撕裂,RTK 会瞬间从 Fix(固定解)降级为 Float 甚至完全失锁。拖拉机会在果园里像无头苍蝇一样撞向果树。
时空底座的下一次跃升,是戒除对卫星的绝对依赖,走向“多源紧耦合”的泛在感知。
1. LEO PNT(低轨导航增强):卫星底座的降维重构
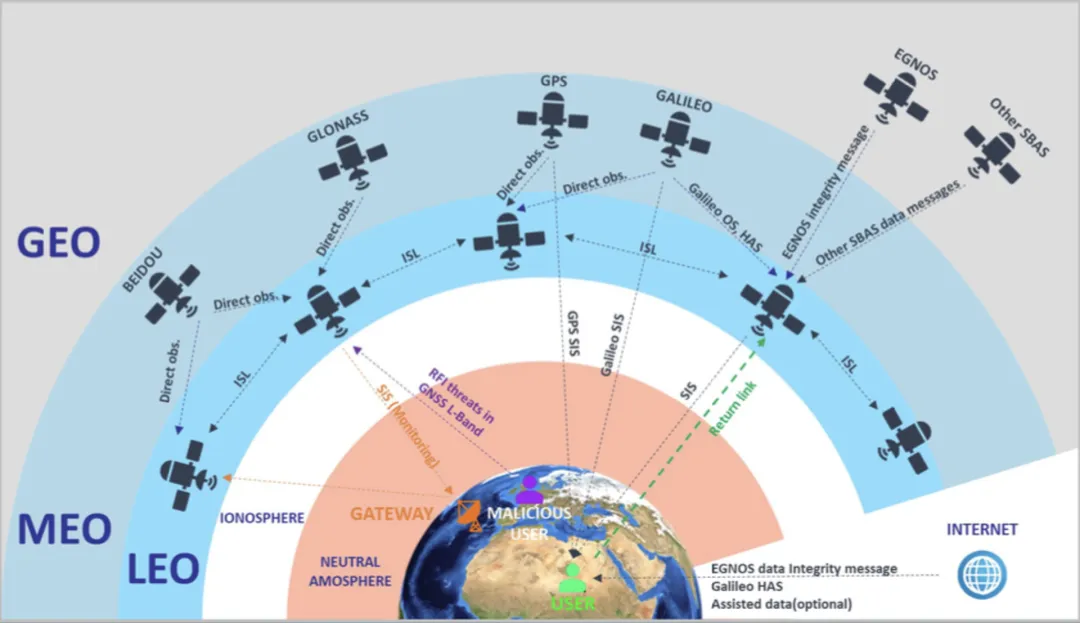
中高轨(MEO)卫星的信号到达地面时,强度甚至不如背景底噪。全球正在加速部署低轨导航增强星座(LEO PNT,如国外的 Xona、国内的时空道宇)。
由于 LEO 卫星距离地球仅 500-1000 公里,其信号到达地面的空间损耗极小,信号强度是传统北斗/GPS 的 100 到 1000 倍。这种“暴力”的信号强度,能够直接穿透果园树冠的遮挡,为林下农机提供极具韧性的高精度原子钟时间戳与空间坐标。
2. LiDAR SLAM 与视觉里程计:构建局部绝对坐标
当卫星信号彻底消失(例如进入连栋温室),农机必须依靠自身的传感器来“丈量”时空。
激光雷达(LiDAR)与点云配准: 农机搭载 3D 激光雷达,高频扫描周围的树干与地貌,生成三维点云。通过 ICP(迭代最近点)等算法,计算前后两帧点云的位移,推演出农机的运动轨迹。
农业场景的致命陷阱(走廊效应): 在笔直且长相极其相似的玉米地或果园中,LiDAR 会遭遇严重的“特征退化”——四周看起来都一样,导致 SLAM 算法发生纵向滑动漂移。
终极解法:因子图优化(Factor Graph Optimization): 现代顶级的农机自动驾驶算法,抛弃了简单的松耦合,采用基于因子图的紧耦合架构。系统将 GNSS 传来的绝对坐标、激光雷达测算的相对位移、视觉相机的特征点以及 IMU(惯性测量单元)的高频加速度和角速度作为“因子节点”统一输入数学图模型中。通过求解非线性最小二乘问题,系统能在各种极端遮挡下,维持一套永不掉线的连续三维坐标系。
第六章:从“刻画”到“先知”——时空大模型(GeoAI)与数字孪生
ArcGIS Pro 与 QGIS,无论其插值算法多么精妙,本质上都是在“刻画过去和现在”。而真正的农业资本博弈,需要的是“预知未来”。
当 GIS 引擎与深度学习(Deep Learning)彻底融合,时空底座演化出了具备预测能力的时空人工智能(GeoAI)。
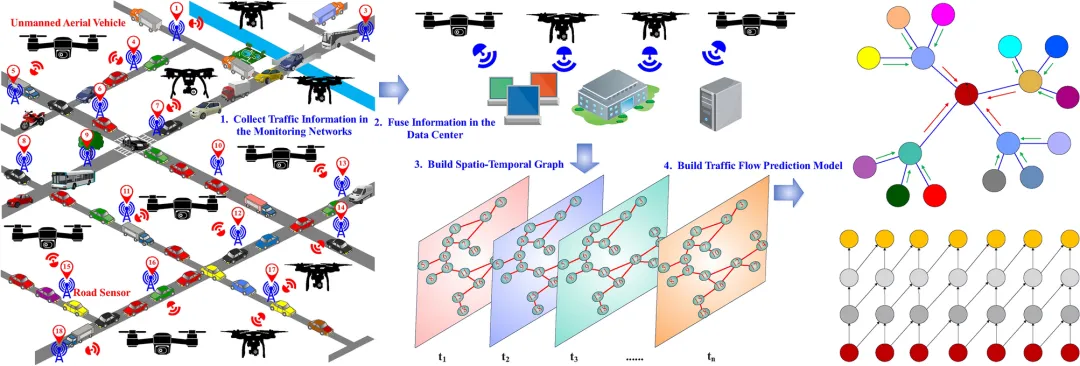
1. 时空图神经网络(STGNN)的降临
传统的农学预测往往依赖单一的生长积温或简单的回归方程。而 GeoAI 引入了处理多维时空张量的终极武器——时空图神经网络(Spatiotemporal Graph Neural Networks) 或 ConvLSTM(卷积长短期记忆网络)。
在 GeoAI 的架构中:
空间特征提取(CNN/GCN): 每一块农田不仅是一个独立的网格,更是与周围地块相互连通的“图节点”。网络能够提取地形坡度、土壤类型的空间扩散特征(例如:高处的病害孢子更容易随水流向低处传播)。
时间序列记忆(LSTM): 网络同时吞吐这块土地过去 10 年的卫星遥感多光谱时间序列(NDVI 变化曲线)、气象站的每日温湿度张量。
算力爆发: 通过将空间矩阵与时间序列张量进行乘加运算,模型能够捕捉到人类无法察觉的微弱非线性关联。
Spatio-temporal envolutional graph neural network for traffic flow prediction in UAV-based urban traffic monitoring system
2. 预测性数字孪生与自动处方生成
这使得农业跨入了一个令人战栗的时代:土地拥有了平行于物理世界的“数字孪生体”。
在春季播种时,GeoAI 就能在服务器后台默默推演。它发现某地块由于微地形背风向阳,且未来两周有异常暖湿气流,判定该特定网格(仅几平方米大小)在一个月后爆发真菌病害的概率高达 85%。
随后,GeoAI 无需人工干预,直接在后台通过 Python 脚本(如 PyQGIS 或 ArcPy),静默生成一份 ISO-XML 格式的靶向防御处方图,并推送到云端。
当植被无人机或拖拉机下地时,它们执行的不再是“治疗”指令,而是极其精准的“预防”指令。这才是时空算力对传统农业最无情的降维打击。
第七章:机械巨兽的黄昏——DDS 协议与蜂群自组织
最后,让我们审视这套底座的执行终端。我们讨论了 ISOBUS 协议,它是为了让一辆重达 30 吨的巨型复式拖拉机完美运转而生的。
但巨型机械正在面临物理极限:土壤压实(Soil Compaction)。几十吨的重量在田间碾压,会彻底破坏土壤的毛细管结构,导致透水性极度下降,最终引起农作物减产。
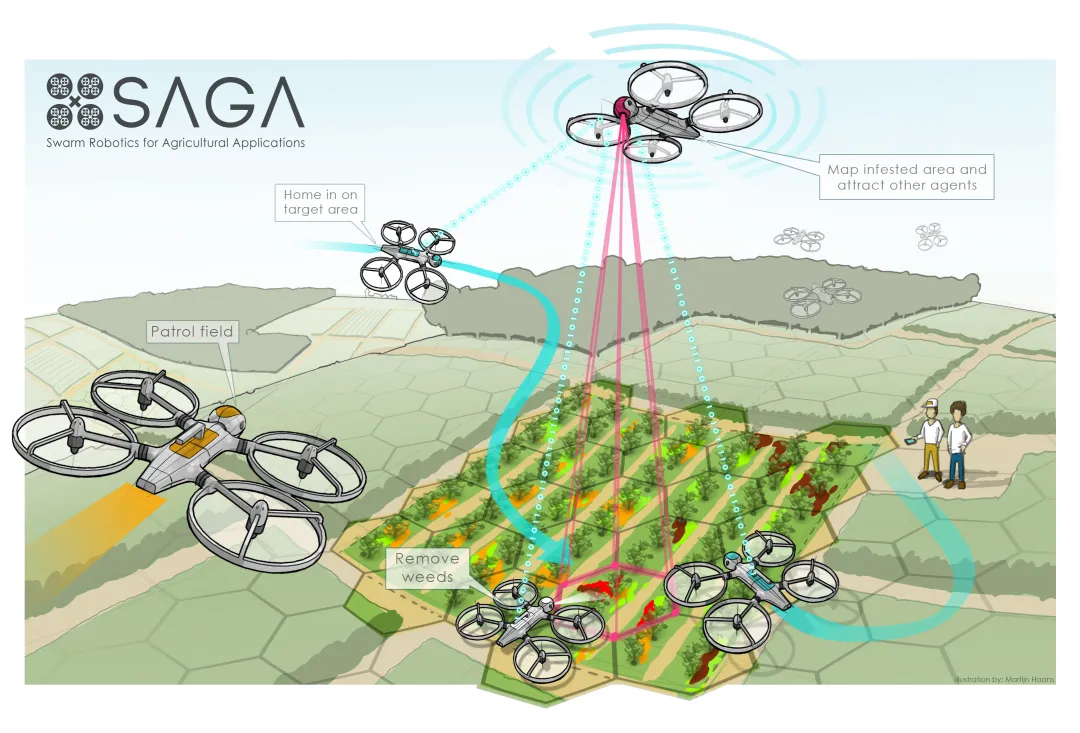
时空底座的终极物理形态,是蜂群机器人(Swarm Robotics)。
1. 从中心化总线(ISOBUS)到分布式通信(DDS)
将一台 30 吨的机器,拆解为 60 台 500 公斤的微型全电动智能底盘。它们不再需要庞大的驾驶舱,但面临着一个极其恐怖的通信难题:60 台机器如何在同一个农田时空网格内,毫秒级地共享位置、防碰撞并动态分配任务?
传统的中心化架构(一台服务器统一指挥)会面临极高的延迟和单点故障风险。因此,时空底座引入了原本用于军方雷达和自动驾驶汽车的底层通信中间件:DDS(数据分发服务,Data Distribution Service),它也是 ROS 2(机器人操作系统)的底层核心。
2. 蜂群的时空协同与动态博弈
在 DDS 协议的加持下,农田里的通信拓扑变成了去中心化的“发布/订阅”网络。
高频时空握手: 每一台微型机器人都作为一个节点,以 50Hz 的频率向蜂群网络“发布”自己的 RTK 坐标、LiDAR 探测到的障碍物以及当前电量;同时“订阅”周围 50 米内其他机器人的状态。DDS 协议的 QoS(服务质量)策略确保了即使网络极其拥堵,最关键的位置坐标也能被强行优先送达。
动态任务切割: 面对一份由 GeoAI 下发的 5000 亩复杂多边形施肥处方图,蜂群不需要中央电脑分配。它们在边缘端通过分布式计算,根据实时的地理位置,动态切割多边形(如使用 Boustrophedon 细胞分解算法)。
自组织愈合: 如果其中两台机器人在泥沼中抛锚,其余的 58 台机器人会瞬间通过 DDS 协议感知到时空网格出现了“火力空白”,算法会自动重构路径规划,无缝接管抛锚机器人的任务区。
智慧农业的时空系统绝非简单的“导航+画图”,它是人类认知和重构地球表面能力的一次空前跃升。GNSS 定义了绝对刻度,通信协议打通了神经网络,GIS 与 ISOBUS 为其注入了精准运行的灵魂。在这套时空法则的统御下,古老的农田褪去了混沌的自然外衣,变成了一台可以被无限度量、精准编程、实时交互的“生物制造机器”。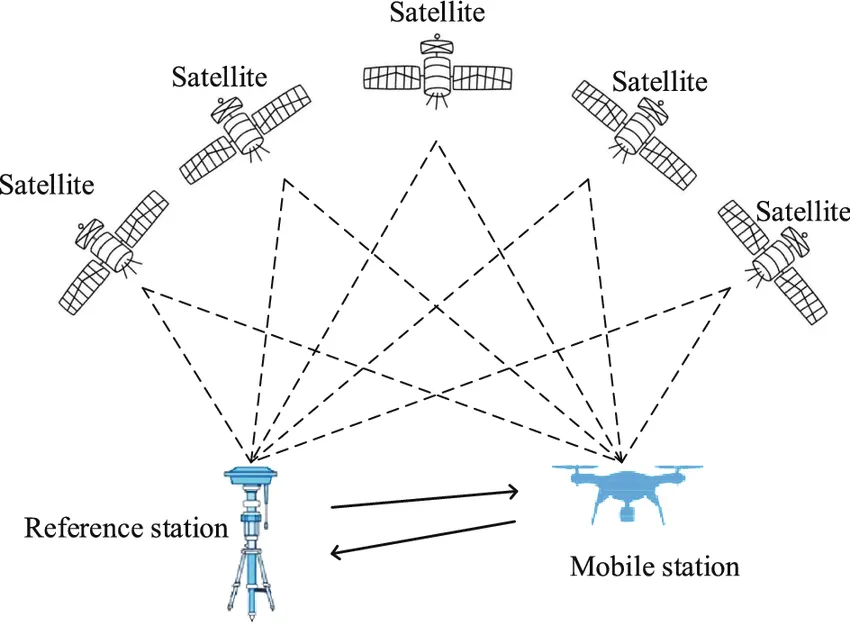


 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
