炭疽病广泛存在于杨树上,准确及时监测病害的发生与发展对于杨树病害的防治至关重要。本研究基于六旋翼无人机搭载MicaSense RedEdge-MX多光谱成像系统,获取杨树林冠层的多光谱影像。研究中采用最大似然法(MLM)对杨树冠层进行分割,利用最小冗余最大相关算法(mRMR)对包含15个植被指数的候选特征集进行筛选,最终选取优化土壤调整植被指数(OSAVI)、差值植被指数(DVI)和增强型植被指数(EVI)作为最优特征组合,并借助支持向量机(SVM)、反向传播神经网络(BPNN)和一维卷积神经网络(1D-CNN)分类算法,构建杨树炭疽病害监测模型。研究结果显示,相比SVM和BPNN模型,1D-CNN模型的总体准确率提高了3.11和6.88个百分点,达到85.03%。1D-CNN模型的Kappa系数为0.775 4,是3种模型中最高的,且健康、轻症和重症分类的错分误差和AUC值分别为27.6%、0.97,8.0%、0.92和36.9%、0.98。研究结果表明,基于无人机多光谱成像技术可以有效地监测杨树炭疽病的发生和分布情况。
杨树是世界中纬度平原地区栽培量最大的速生用材树种之一,对维护生态系统稳定、增加森林碳汇能力,实现可持续发展至关重要。炭疽病是杨树的重要病害之一,广泛分布于我国西北和华北地区。由于树种单一、栽植密度高以及高湿度等原因,该病的发生面积急剧增大,发病率逐年升高,已成为制约其生态效益的主要原因。
杨树炭疽病是由胶孢炭疽菌引起的一种重要病害。该病原菌主要通过分生孢子或菌丝在杨树气孔和伤口的外表面诱导形成附着孢子,从而感染杨树。
目前,杨树炭疽病的检测技术主要包括传统的林间实地观察和基于生物学的病害检测方法。传统的林间实地观察费时费力且高度依赖调查者的专业知识,而基于生物学的检测方法成本高且需要实验室环境。
近年来,无人机遥感技术在林业病虫害监测中得到了广泛应用。该技术以其非破坏性和高效获取病害信息的优势,显著提高了监测效率,降低了成本,并增强了实时监测能力。本研究旨在将无人机遥感技术应用于杨树炭疽病的监测,克服传统监测方法的局限性,促进杨树林的健康管理和可持续发展。
无人机遥感是一种融合飞行器、传感器、通信和差分定位等技术的高精度遥感技术,为林业病虫害的大面积无损监测任务提供了重要的技术手段。与常规的卫星、载人遥感等技术相比,无人机具有成本低、受气象条件影响小、空间分辨率高、可更换传感器以及重访周期短等优点。
近年来,国内外学者开展了一系列利用无人机遥感进行病虫害监测的研究工作。
·Park等对热带森林中树木叶片覆盖变化情况进行了调查,结果显示,无人机可见光影像结合机器学习算法有望提高监测效率。
·黄丽明等采用YOLO算法和无人机可见光影像对松材线虫病异常变色木进行识别,识别平均精度达80.85%。然而,可见光相机只能捕捉可见光波段的信息,且影像质量受光照条件影响较大,不同时间和天气条件下获取的数据一致性较差,难以进行长期监测和对比分析。
随着遥感技术的发展以及传感器生产成本的下降,多光谱相机在无人机林业病虫害监测中的应用逐渐普及。多光谱相机具有结构紧凑、波段多和成像速度快等优势,可同时获取一维光谱信息和二维空间信息,这在分析植被健康状况和识别病虫害方面具有重要作用。此外,将多个光谱波段数据进行组合计算得到植被指数,能够更敏感地捕捉植被健康状态的微小变化。
·Georgieva等利用无人机获取的多光谱影像提取归一化植被指数(NDVI),并针对松树人工林中的不同土地覆盖(健康树、病树、枯树、草、灌木和石头)和小蠹虫分布进行了精准测绘。
·Zeng等运用无人机获取橡胶林冠层多光谱影像,除了植被指数还提取了纹理和颜色特征,成功构建了白粉病严重程度的识别模型,其中支持向量机(SVM)模型对白粉病早期阶段的识别率达93.2%。
·苏宝峰等利用无人机采集自然发病的育种群体小麦冠层多时相的多光谱图像,使用随机蛙跳算法和Relief算法筛选出6个能够较好区分不同抗病等级的植被指数,并通过格拉姆角场方法将特征转化为二维图像、使用DenseNet121网络进行训练,以实现不同条锈病抗病等级的分类。
上述研究表明,无人机搭载多光谱成像系统能够准确识别病虫害的分布和严重程度,在精准林业领域具有巨大的应用前景。
南京林业大学祝凯、蒋雪松等以杨树多光谱遥感影像为数据基础,采用最大似然法分割出杨树冠层,并结合RTK坐标点信息获取冠层光谱反射率,计算相关植被指数。接着,运用最小冗余最大相关法对植被指数特征集进行筛选,结合支持向量机、反向传播神经网络以及一维卷积神经网络分类算法构建杨树炭疽病害监测模型,旨在找出最优模型,并评估无人机多光谱遥感技术在杨树炭疽病害监测中的应用效果,以期为未来杨树炭疽病害的监测提供参考依据。1.1研究区域
试验区位于江苏省南京市栖霞区八卦洲湿地公园(118.80'E,32.15'N)内,地处亚热带季风区,气候温暖湿润,季节变化明显,6—9月为降雨高峰期,年降雨量1 000~1 100 mm。该地区年均气温15.4 ℃,东南风和东北风为主要盛行风向。八卦洲湿地公园位于八卦洲岛西南洲头,占地面积690 hm2,其中水域面积为276 hm2。样地选址于公园东北方向,总计调查235棵杨树,树间距为2~3 m。经现场调查确定,该地区杨树的死亡主要是由炭疽病导致的。
1.2数据采集
1.2.1 地面样本数据采集
地面样本数据采集工作于2023年7月15日10:00—14:00开展。首先,利用实时动态定位(RTK)系统对研究区域内的235棵杨树进行定点观测,使用精度为0.01 m的固定解模式定位。为了实验的客观性,首先将杨树根据高度划分为上、中、下3层,然后使用高枝剪从每层随机采集3片叶片,共计9片叶片,将其装入已编号的密封袋中,运送至实验室进行病情鉴定。本研究参考《主要林业有害生物成灾标准》(林造发〔2012〕26号)中对非检疫性有害生物叶部病害危害程度的分级标准,并结合杨树炭疽病不同阶段的病情特征以及遥感影像的可分辨性,将杨树叶片分为健康、轻度和重度3个等级(表1)。为了量化整体病情情况,通过计算病情指数对整棵杨树的病情进行综合评价。基于上述划分标准,以杨树为样本单位,所得到的样本包括68份正常样本、147份轻度样本以及20份重度样本。病情指数的计算公式如下:
式中:ni为第i级的病叶数; vi为第i级的代表值; N为调查总叶数; Vmax为最高级的代表值。
1.2.2 无人机遥感数据获取
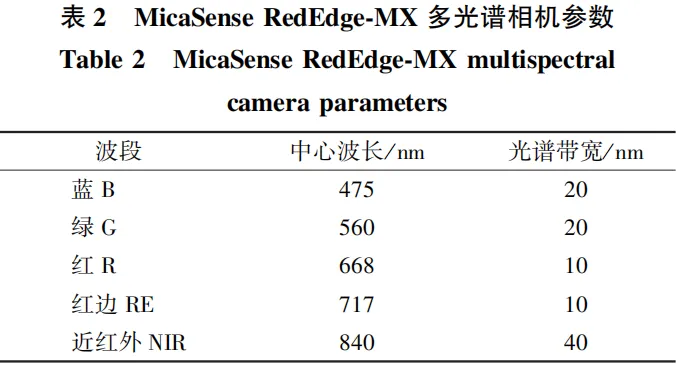
本研究采用自主研发的六旋翼无人机(图1),在大疆F550的结构基础上,加装了可安装多光谱相机的防震云台,满负荷状态下有效起飞质量为3 kg,60 m高空拍摄面积达11 567 m2。无人机搭载MicaSense RedEdge-MX多光谱相机,可同时采集蓝、绿、红、红边和近红外5个波段的数据,详细参数见表2。航拍于2023年7月16日12:00左右进行,天气晴朗,风力小于3级。无人机按事先设定的航线飞行,飞行区域覆盖整片样地,为了保证影像质量和作业效率,无人机在60 m高度以4 m/s的速度飞行,重叠率设定为航向80%和旁向70%。飞行过程中,放置聚四氟乙烯(PTFE)板至样地中,用于后续的反射率校正。
1.2数据预处理
从相机存储卡中导出数据后,需要对航拍影像进预处理。使用Agisoft Metashape Professional软件对齐影像、构建密集点云、生成数字高程模型、建立正射影像以及归一化反射率,最终获得整片研究区域的多光谱影像。本研究基于ENVI 5.6软件平台,利用最大似然分类器对多光谱图像执行基于像素的监督分类,实现遥感影像的地物分类以及有效剔除杨树冠层之外的干扰地物。最大似然估计是基于贝叶斯准则的一种方法,其假设图像各个类别的像素值服从多变量正态分布。在此基础上建立判别函数,通过计算图像中每个像素属于各个类别的概率来得出最终的图像分类结果。杨树冠层交错生长形成了高度复杂的树冠结构,导致其冠层边界的不清晰和不规则,因此,使用基于图像处理的分割算法难以有效准确识别和提取单株树木的树冠。在本研究中,基于地物分割后的杨树冠层影像,导入RTK坐标信息以确定杨树的具体位置,每个RTK坐标点的附近提取10个像素点反射率值作为该杨树的反射率值。提取多个像素点的方法不仅有效捕捉了冠层的局部变异性,还通过增加样本量提高了数据的丰富性,从而提升了分类模型的训练效果和泛化能力,增强分类的准确性。
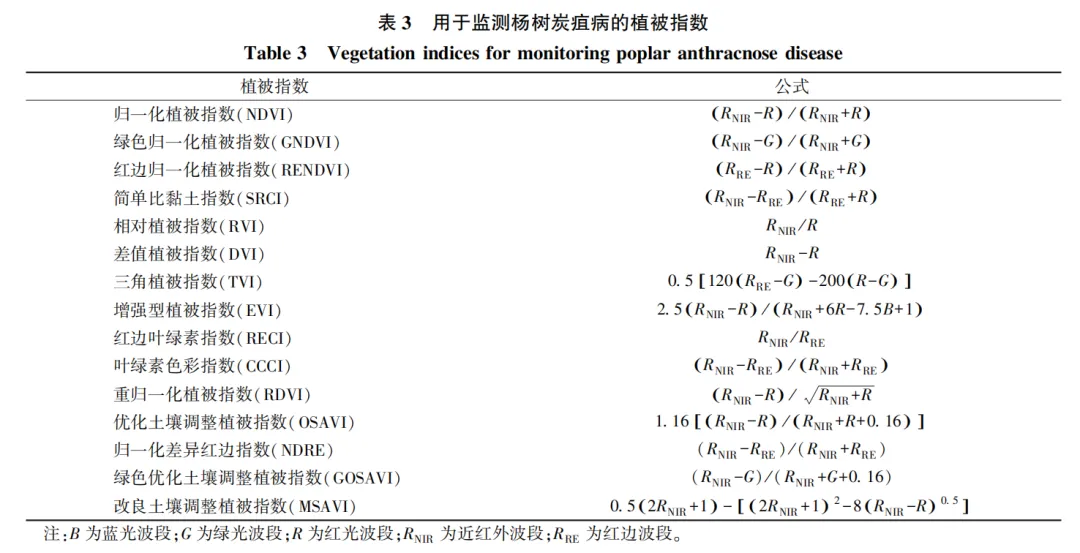
遥感监测病虫害的基本原理是植物受到病虫害胁迫时,叶片的细胞结构、叶绿素含量以及含水率等都会发生变化,进而导致植物的反射光谱发生改变。正是基于这一原理,植被指数被开发出来,作为一种由遥感影像数据中不同波段组合计算得到的分类指标,在土地利用、农作物监测以及植被覆盖等领域具有重要的应用价值。本研究在查阅国内外有关农林病虫害遥感监测资料的基础上,选取15种常见的植被指数作为候选特征集(表3),并基于Python 3.8.6软件平台对前面提取到的反射率值进行批量计算。
1.3特征选择
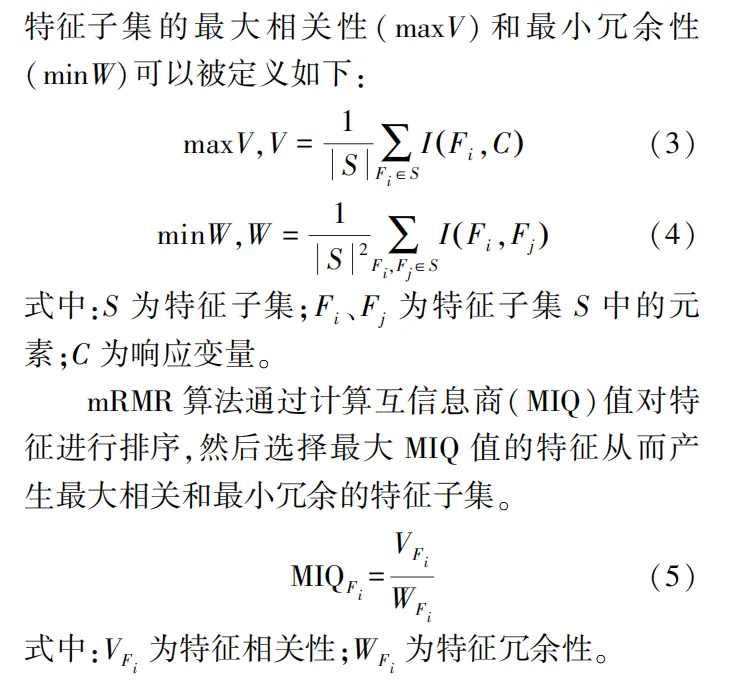
特征选择作为一种常见的数据筛选技术,通过从数据中识别并移除不相关和冗余特征,提高学习性能、降低过拟合和赋予模型更好的可解释性。常见的特征选择算法包括基于相关性的特征选择(CFS)、主成分分析(PCA)、递归特征消除(RFE)和最小冗余最大相关(mRMR)等。与其他特征选择算法相比,mRMR(minimum redundancy maximum relevance,最小冗余最大相关)算法更注重特征间的独立性,不受线性关系假设的限制,高效而全面地考虑到所有特征。mRMR算法的主要目标是从候选特征集中寻找最优特征子集,使其在与目标类别间具有最高相关性的同时特征子集间的冗余性保持最小。为评估特征X和Y之间的相似性,mRMR算法会先单独评估整个数据集中的每个特征,然后利用公式I(X,Y)计算特征之间的互信息。
1.4建模方法
本研究基于Python 3.8.6软件平台,引入以支持向量机(SVM)为代表的单份分类器模型、以反向传播神经网络(BPNN)为代表的黑盒模型,以及以一维卷积神经网络(1D-CNN)为代表的深度学习模型,分别构建杨树炭疽病病情严重程度的监测模型,并对分类结果进行比较。为了确保模型评估的公平性和一致性,各分类模型所使用的数据集统一划分为训练集70%、测试集30%。
支持向量机(SVM)是一种基于统计学理论的数据挖掘方法,其思想是寻找一个在保证分类精度的同时将不同类别数据最大化分开的超平面。SVM算法结构简单、适应性强、鲁棒性好,能够很好地处理回归和模式识别等问题。本研究使用了“sklearn.svm.SVC”软件包来建立SVM分类模型,参数设置如下:核函数为线性(kernel=linear)、惩罚系数为1.0(C=1.0)以及径向核搜索参数为auto(gamma=auto)。
反向传播神经网络(BPNN)是目前应用最为广泛的多层前馈神经网络模型,其关键在于利用反向传播算法不断调整网络中的权重和偏置,以最小化误差函数,具备自我学习和自适应调节的特点。BP神经网络由输入层、隐藏层和输出层构成,各层之间通过权重和偏置进行连接。其基本思想是通过梯度下降法来降低预测误差,以便更准确地预测结果。本研究利用TensorFlow和Keras库构建了BP神经网络模型,并在数据读取后采用mapminmax函数进行数据归一化,从而加快梯度下降法的收敛速度。该BPNN网络包含4个全连接层,包括3个隐藏层和1个输出层,各隐藏层的单元数分别为64、128和64,激活函数分别采用sigmoid函数和softmax函数。迭代训练次数设定为200次,优化器采用Adam,初始学习率为0.001。
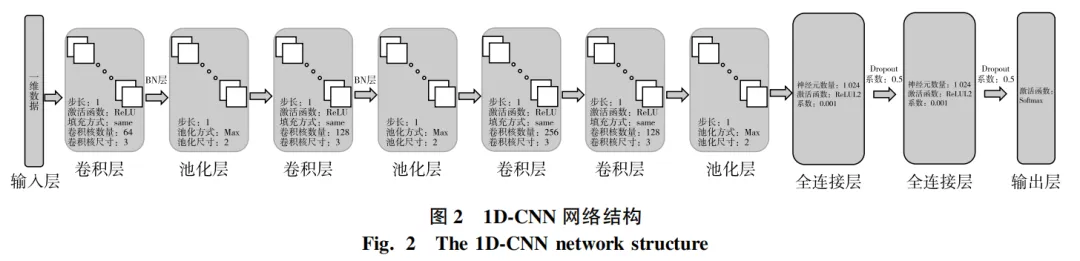
一维卷积神经网络(1D-CNN)作为卷积神经网络的一种变体,主要应用于处理一维数据,例如时间序列和文本数据等。其核心思想在于对一维数据进行卷积操作,利用卷积核的滑动窗口来提取局部特征,逐层组合这些特征以捕捉更高级别的特征和模式。相比传统的机器学习方法和全连接神经网络,1D-CNN能够更有效地捕捉局部关系。本研究对1D-CNN进行了改进和优化,基于经典的AlexNet模型进行设计,并采用了与BPNN相同的环境配置。AlexNet是深度学习领域的重要工作之一,主要用于二维图像数据的分类任务。因此,在本研究中,针对一维序列数据对AlexNet进行了优化。在保留了AlexNet中关于卷积层堆叠、ReLU激活函数和Dropout层的基础上,本研究调整了卷积核尺寸、池化层参数以及全连接层的设计,以更好地适应一维序列数据的特点。1D-CNN的网络结构主要包括一维卷积层(Conv1D)、批归一化层(batch normalization layer)、最大池化层(max pooling layer)和全连接层(fully connected layers)。在该网络中,通过一系列卷积层提取输入数据的特征,然后经过池化层进行降维,逐渐提取更高级别的特征表示。接着,通过全连接层展平特征,并传递给两个包含1 024个神经元的隐藏层,同时添加Dropout层以减少过拟合。最后,通过softmax激活函数在输出层输出类别概率分布,完成对输入数据的分类预测。在神经网络的训练过程中,使用“ReduceLROnPlateau”回调函数对学习率进行动态调整。具体的调整策略如下:当验证集损失在连续10个epoch内没有改善时,学习率将减少一半,同时将最小学习率设定为0.000 1。为了避免过拟合并节省计算资源和时间,采用“EarlyStopping”早停技术来监控验证集的表现。停止策略设定如下:当验证集损失在连续20个epoch内没有改善时,提前停止训练。本研究的具体模型结构如图2所示。
1.5评价指标
为了评价分类模型的表现,本研究采用总体准确率(overall accuracy,OA,式中记为OA)、Kappa系数、混淆矩阵和受试者工作特征曲线(receiver operating characteristic,ROC)作为评价指标。总体准确率(OA)则表示模型正确分类样本数占总样本数的比例,其计算公式如下:
式中:N为总样本数; akk为正确分类样本数; n为类别数。
Kappa系数(式中记为K)是一种用于评估分类模型性能的统计指标,Kappa系数值越大,分类效果越好,其计算公式为:
式中:观测准确率(observed accuracy,OA,式中记为O'A)为模型在实际测试集上的准确率; 期望准确率(expected accuracy,EA,式中记为EA)为模型在随机分类下的准确率。
混淆矩阵是一种常用方法,用于评估分类器在测试集上的性能,它提供了模型在各个类别上真阳性、假阳性、真阴性和假阴性的数量,从而描述测试集样本数据的真实属性与分类器识别结果之间的关系。
ROC曲线(receiver operating characteristic curve,受试者工作特征曲线)是一种坐标图式的分析工具,常被用于评价二分类模型性能的优劣。ROC曲线的横轴是假阳性率(false positive rate,式中记为RFP),纵轴是真阳性率(true positive rate,式中记为RTP),其计算公式分别如下:
式中:TP表示真正例(true positives); FN表示假反例(false negatives)。
AUC(area under the curve,曲线下面积)值是指ROC曲线下的面积,量化了分类器在正类和负类之间进行区分的整体能力,取值范围为0~1。
2.1冠层提取
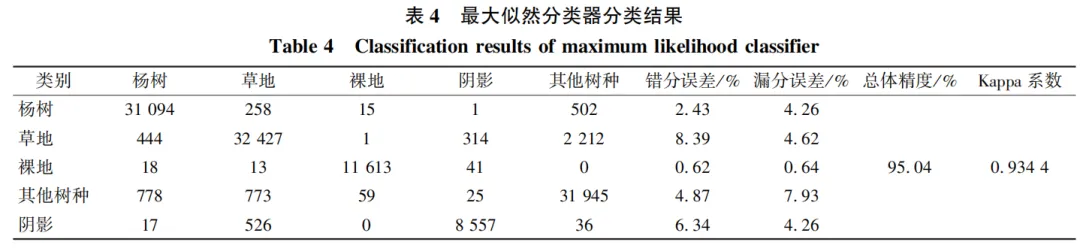
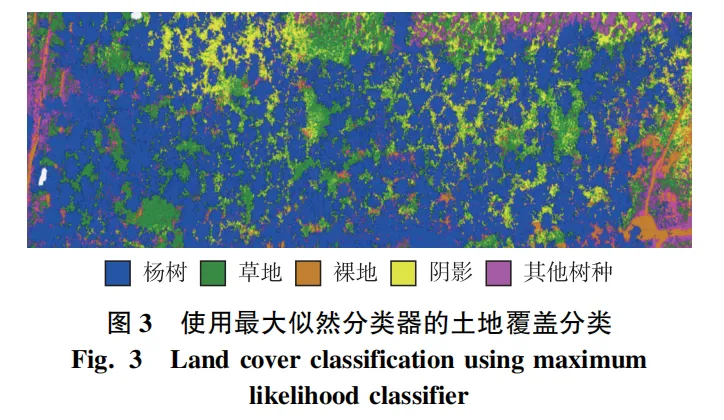
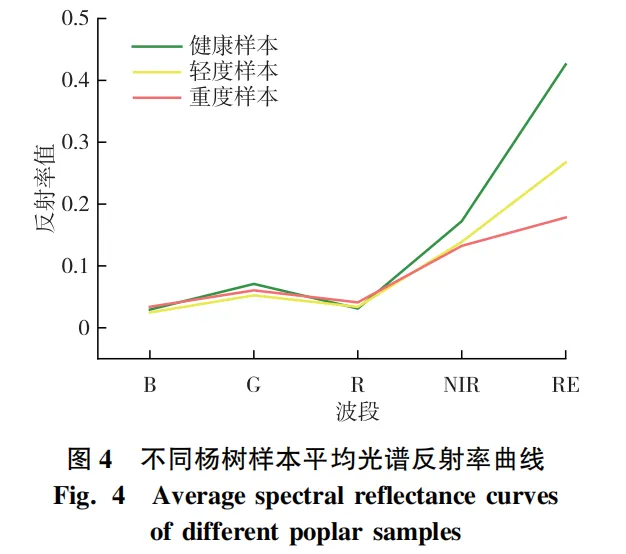
冠层提取过程中,地物被分为杨树、草地、裸地、阴影和其他树种5个不同的覆盖类别。分类结果以像素为基本单位,与真实感兴趣区进行混淆矩阵分析结果见表4。从表4可以看出,最大似然分类器可以有效地区分开不同地物,其中杨树的错分误差和漏分误差分别为2.43%和4.26%,整体分类准确率和Kappa系数分别为95.04%和0.934 4。分类结果如图3所示。从分类结果中裁剪出杨树冠层影像,导入杨树RTK坐标点作为参考,每个坐标点附近提取10个像素点反射率值作为该杨树的反射率值,最终获得235棵杨树共计2 350条光谱反射率数据。不同杨树样本平均光谱反射率曲线如图4所示。
2.2最优特征变量组合
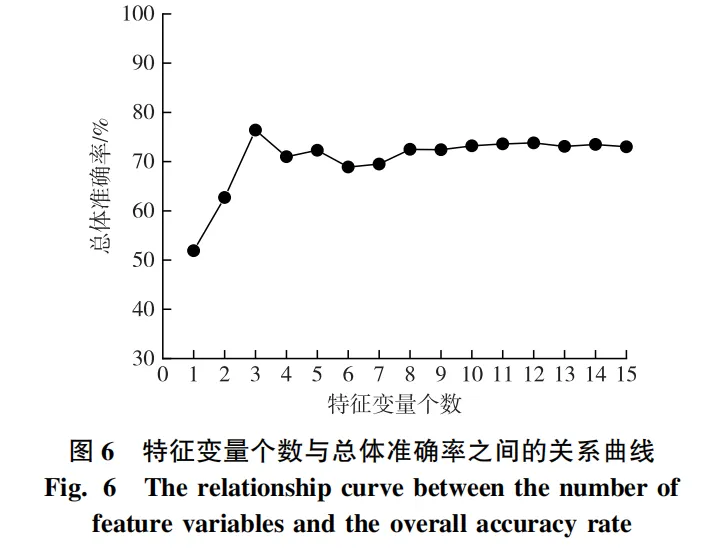
本研究使用mRMR算法对由15个植被指数组成的候选特征集进行重要性降序排列(图5)。从图5可以看出,这些特征按重要性依次为OSAVI、DVI、EVI、RDVI、TVI、SRCI、NDRE、RECI、MSAVI、GNDVI、CCCI、GOSAVI、RENDVI、NDVI和RVI。随后,为了优选最优特征组合,将这些特征按重要性顺序逐一叠加到RF(random forest,随机森林)分类模型中进行建模,得到特征变量个数与总体准确率之间的关系曲线(图6)。从图6可以看出,当特征变量个数为3时,总体准确率达到最大为76.4%,随后随着特征变量个数的增加,总体准确率略有下降。因此,确定最优特征变量个数为3,选择OSAVI、DVI和EVI作为本研究的最优特征组合。
分析筛选出的植被指数组合发现,优化土壤调整植被指数(OSAVI)主要用于土壤背景变化显著或植被覆盖度较低的区域,以有效监测植被覆盖状况和生长健康状态。在本研究中,经过预处理阶段对无人机遥感影像进行地物分类后,仅保留了杨树冠层的影像用于后续分析。因此,本研究并未直接考虑土壤背景对植被指数的干扰,而是专注于杨树冠层区域健康状况的评估。通过对OSAVI公式的深入分析可以看出,OSAVI在传统NDVI的基础上进行了优化改进,具体表现为在保留近红外波段与红光波段组合的同时,引入了常数0.16作为土壤背景调整因子,并应用了系数1.16以提高指数的稳定性和敏感性。这些改进显著增强了OSAVI对植被微小变化的检测能力,使其在植被病害监测中展现出更高的准确性和可靠性。特别是在植被病害初期光谱信号微弱的情况下,OSAVI凭借其对土壤背景的有效校正,能够更精确地识别和评估植被健康状况,从而为病害的监测预警提供了有力的支持。植被在可见光至近红外光谱波段中的反射率主要受到色素含量、细胞结构和含水率等因素的影响,光谱特征反映了植被内部生化成分的动态变化。从图4可以观察到,健康杨树在红光波段的反射率低于感染炭疽病的杨树,而在近红外波段则表现出健康杨树的反射率高于感染炭疽病的杨树。此外,随着炭疽病症状的加重,这一反射率差异会逐渐扩大。这一现象可能是炭疽病导致叶片叶绿素含量下降以及叶肉细胞结构受损所造成的。利用差值植被指数(DVI),通过计算近红外波段(NIR)和红波段(R)的反射率差,可以评估植被的生长状况、变化趋势以及健康状况。随着炭疽病情的加重,DVI差值也会呈现逐渐增大的趋势。叶片是树木进行光合作用和水气交换的主要器官,叶片面积指数(LAI)是衡量植被光合能力和健康状况的重要指标。炭疽病的感染会引起杨树的叶片焦干、提早落叶及枝梢干枯,导致患病杨树的LAI值低于正常杨树,并且随着病情的加重,这一差距会进一步扩大。为了有效地监测LAI的变化并评估炭疽病对杨树健康的影响,增强型植被指数(EVI)作为一种改进的植被监测工具,能够通过修正大气干扰、地表反射和植被结构等因素的影像,从而更准确地反映因炭疽病引起的杨树LAI变化。因此,本研究选择了优化土壤调整植被指数(OSAVI)、差值植被指数(DVI)和增强型植被指数(EVI)的组合,旨在对杨树炭疽病的病情等级进行准确分类。
2.3模型评估
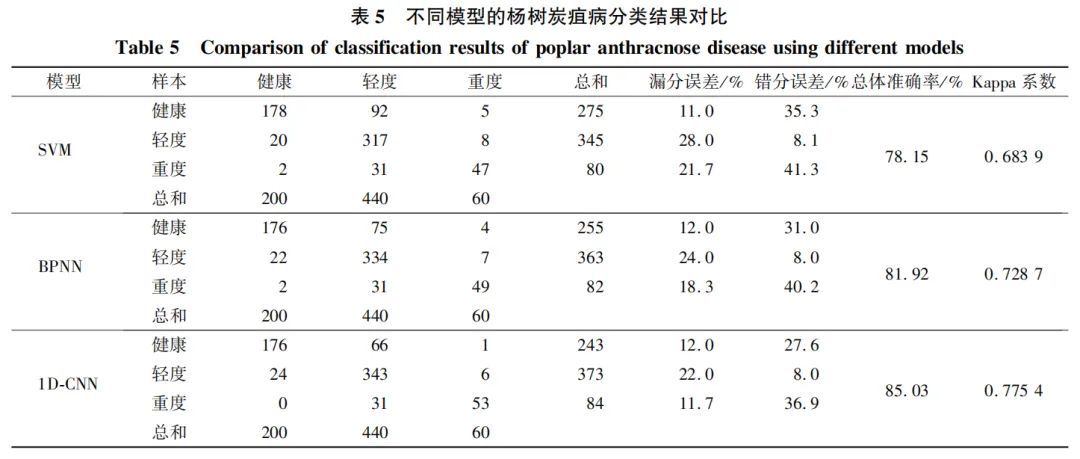
为构建杨树炭疽病监测模型,本研究选取了最优特征子集(OSAVI、DVI和EVI),分别输入支持向量机(SVM)、反向传播神经网络(BPNN)和一维卷积神经网络(1D-CNN)模型中。在杨树炭疽病监测模型中,基于SVM、BPNN和1D-CNN的分类效果均表现良好(表5)。综合总体精度和Kappa系数的比较,1D-CNN模型达到了最佳表现,其总体准确率为85.03%,Kappa系数为0.775 4; BPNN模型略逊,总体准确率为81.92%,Kappa系数为0.728 7; 而SVM模型表现最差,总体准确率为78.15%,Kappa系数为0.683 9。进一步对比3种模型在不同样本上的错分误差发现,1D-CNN模型在健康和重症样本方面的错分误差最低,分别为27.6% 和36.9%; 其次是BPNN模型,分别为 31.0% 和40.2%; 而SVM模型的错分误差最高,分别为35.3%和41.3%。在轻症样本上,3种模型的错分误差相近,均为8.0%左右。
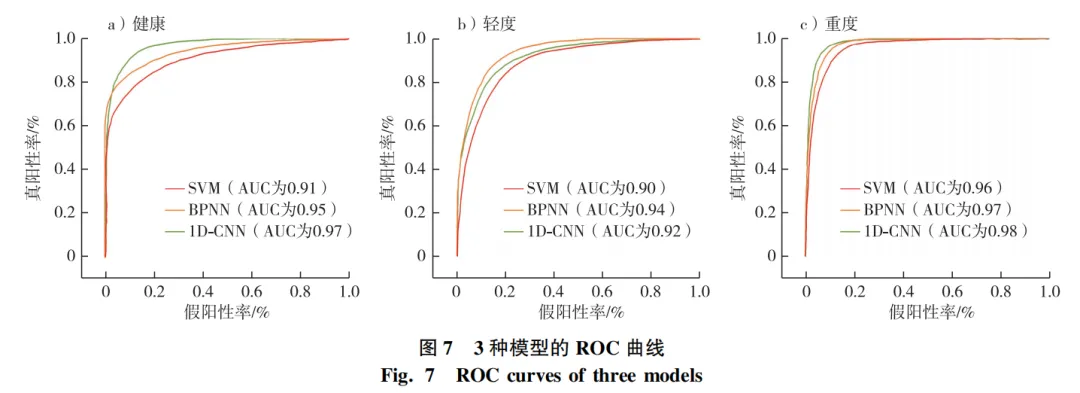
ROC曲线下面积(AUC)值越高,表示模型的拟合效果越好。3种模型的ROC曲线见图7。由图7可见,SVM、BPNN和1D-CNN模型的AUC值均在0.90以上,说明它们的预测效果可靠。尤其是1D-CNN模型在健康和重症样本上的AUC值分别为0.97和0.98,优于其他模型; 而在轻度样本中,AUC值为0.92,稍低于BPNN模型的0.94。综合考虑,1D-CNN模型表现最优,具有最高的总体准确率和Kappa系数,并且在健康和重度类别的分类上表现也最佳。BPNN模型在大多数情况下居于次优地位,而SVM模型表现最差。基于1D-CNN模型在各种样本上出色的拟合效果,因此,本研究选择1D-CNN模型作为理想的分类模型。
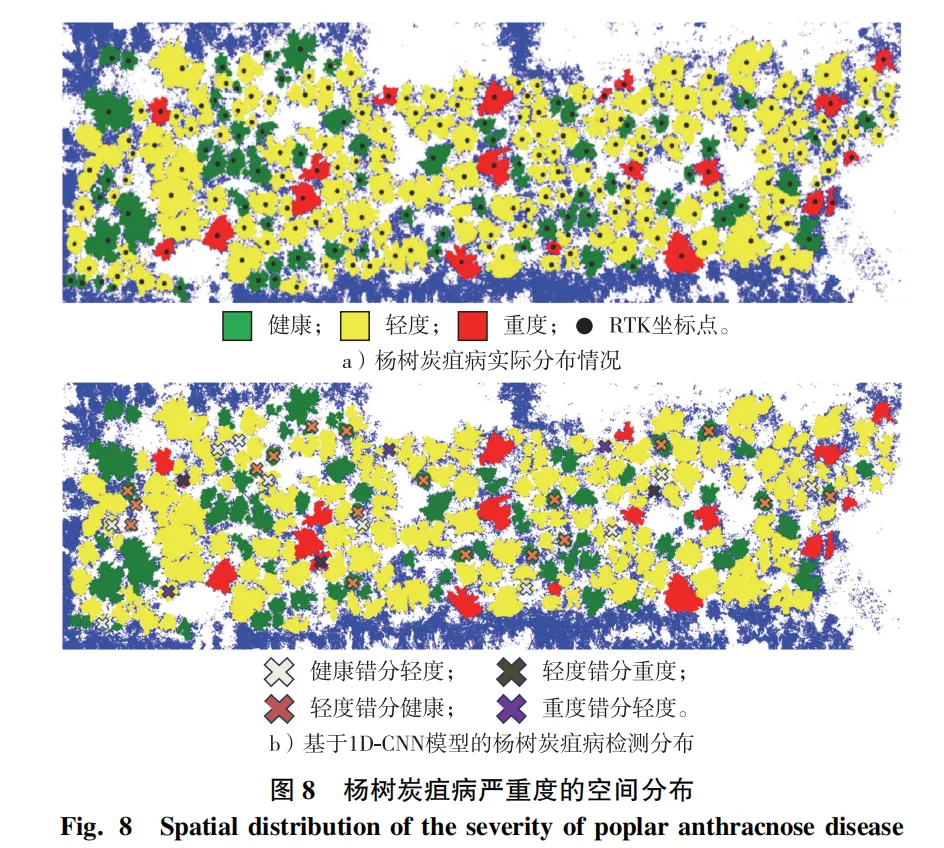
为研究区域内杨树炭疽病的空间分布特征,将最优特征组合输入1D-CNN模型,并绘制病情严重程度的空间分布图。杨树炭疽病的实际分布情况见图8a,基于1D-CNN模型的病情监测分布见图8b。对比可知,有10个健康样本被误判为轻症样本,18个轻症样本被误判为健康样本,3个轻症样本被误判为重症样本,以及3个重症样本被误判为轻症样本。总体而言,监测结果与实际病情之间存在较高的一致性。健康的杨树主要分布在北部和中部位置,轻症状杨树均匀分布在林区中,而数量较少的重症状杨树则零星分布在轻症状杨树周围。1D-CNN模型在病情误判方面主要出现在相邻两种病情程度之间,这可能是由于健康状态和轻症状、轻症状和重症状的光谱特征存在相似性,同时,不同病情程度的杨树冠层间存在交叉覆盖,进一步影响了光谱反射率的准确提取。
3.1讨 论
在本研究中,使用搭载MicaSense RedEdge-MX多光谱成像系统的无人机获取杨树冠层的高分辨率影像数据。通过最大似然法对遥感影像进行分类处理获取杨树冠层影像,并结合RTK测绘得到的地理坐标信息获取杨树的光谱反射率。该方法操作较为简单,且在小规模数据集上能够提供相对准确的分类结果,但在应用于大规模森林区域时,可能会遭遇效率低下和背景干扰等挑战。特别是在需要快速处理大量树冠数据的场景中,手动选点的效率问题尤为突出。同时,森林中树冠的相互遮挡以及复杂的背景条件可能会对光谱反射率的准确性造成影响。针对杨树这类具有复杂树冠结构,并且树冠有多个最高点的阔叶林,后续可以采用基于树冠轮廓的机器学习分割方法,如尺度分割法、谷底跟踪法和模板匹配法等,以提高分割准确性和效率。此外,多传感器融合遥感技术在遥感领域中正逐渐成为一种重要趋势。将多光谱数据与激光雷达(LiDAR)点云数据相结合,不仅能够丰富数据维度,还能在处理树冠重叠和遮挡问题时提供更好的分割精度。
目前,基于无人机平台搭载多光谱传感器进行林业病虫害监测研究,主要采用归一化植被指数(NDVI)进行监测。然而在植被覆盖度较高的区域,NDVI值容易饱和,难以区分不同健康状态的高密度植被。同时,对于一些早期或轻微的病虫害,NDVI的分辨能力较差,难以及时监测到这些问题。为了提高监测的精度和全面性,需要结合其他植被指数进行综合分析。本研究中,对获取的冠层光谱反射率数据计算多种植被指数,以提高分类的准确性并减少单一指数带来的不确定性。接着使用mRMR(最大相关最小冗余)特征筛选算法进行特征筛选,以去除冗余特征,增强结果的可解释性。本研究仅使用单时相多光谱影像监测杨树人工林,缺乏对杨树炭疽病早期感染阶段和长期趋势的探究。这类病害的早期检测对于及时采取防治措施至关重要,而长期趋势分析则有助于预测病害的潜在影响和制定长期的林业管理策略。为了弥补这一不足,未来的研究将关注收集和分析多时相的遥感影像数据,持续追踪病害的演变过程,并把基于多时相多光谱遥感影像监测杨树炭疽病早期感染阶段作为研究的重点。
在遥感领域,机器学习和深度学习各有优缺点,本研究对比了SVM、BPNN和1D-CNN 3种不同类型模型在杨树炭疽病情程度分类任务中的表现,综合总体准确率、Kappa系数、混淆矩阵和ROC曲线的结果来看,1D-CNN的效果好于BPNN模型,SVM模型的效果最差。得益于卷积层的堆叠结构,1D-CNN能够有效地捕捉数据中的复杂线性和非线性关系,并且在处理更复杂和高维数据时,相比传统的机器学习模型具备更好的扩展性。尽管1D-CNN模型在大多数情况下能够准确预测病害类别,但仍存在一定的改进空间。可以通过增加样本量、改进特征提取方法以及探索不同分类器算法与深度学习模型相结合的方法,来提高病害识别的准确度。未来,深度学习在遥感数据分析中将占据主导地位,而机器学习在特定应用场景中仍具重要价值。多传感器融合、大数据分析和高性能计算技术的发展,将进一步推动深度学习和机器学习在遥感领域的融合应用,促使遥感数据分析向更高精度、更高效率和更智能化方向发展。