一、研究背景
温室机器人是现代温室的重要技术装备,自动化导航技术作为其核心技术,可减少重复作业、降低成本并减轻农民劳动强度。目前温室机器人导航定位方法主要包括室内传统导航定位技术和SLAM即时构建技术。传统导航定位技术存在诸多局限,如Wi-Fi依赖多传感器信号且计算测试成本高、惯性导航随距离增加误差累积、视觉导航易受光照影响、VIO系统设计和参数调整复杂难以适应复杂农业场景。而SLAM技术能帮助温室作业机器人摆脱对卫星信号和惯性导航的依赖,实现自主作业,且环境地图对机器人精准导航定位至关重要。中国是番茄种植面积和产量全球第一的国家,其中温室种植番茄占比高,但目前温室番茄采摘主要依赖人工,对自动化采摘设备及配套的自动化底盘需求迫切。
二、研究方法
1.多算法融合
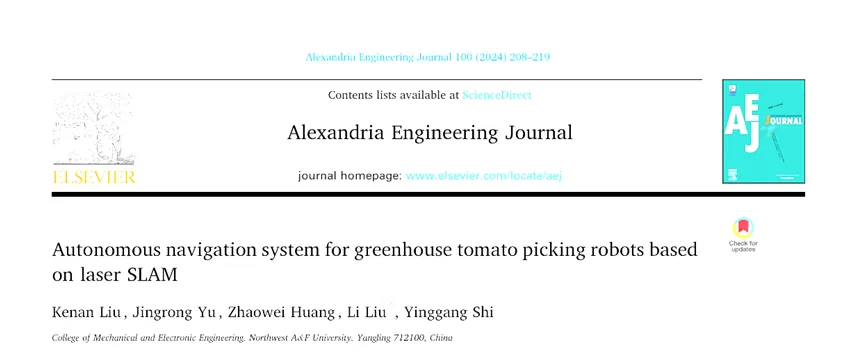
采用 Gmapping算法(基于粒子滤波)构建环境二维栅格地图。基于粒子滤波的Gmapping算法,可在未知区域为机器人生成其周边环境的高精度二维矢量地图。该Gmapping 技术能够辅助构建机器人当前所处位置的周边环境地图。这一过程需要借助激光雷达(LiDAR)实时扫描数据和里程计数据,将两类数据与数学模型相结合,以此估算机器人的位姿。该过程的输出结果为二维栅格地图信息。
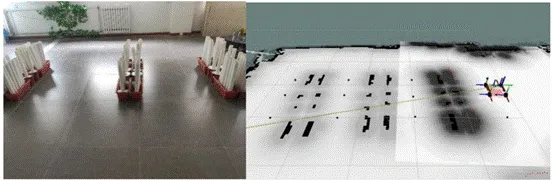
图1 基于二维栅格地图的实验室特定路径巡航试验场景
AMCL 算法实现机器人在地图上的精确定位。AMCL(自适应蒙特卡洛定位)是基于概率模型的平面定位算法,核心是用有限粒子表征机器人可能位姿分布。基于已知地图与激光雷达、里程计数据,粒子对应潜在位姿;结合新传感数据评估粒子有效性后重采样提升精度。经运动、传感采集、重采样迭代循环至定位成功(粒子群收敛真实位姿),通过 MCL 模型初始化粒子群、观测更新调整权重,KLD自适应采样优化粒子数量,最终发布定位信息。
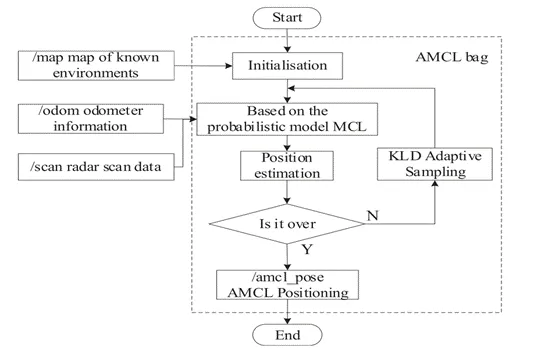
图2 AMCL 定位节点的通信架构
A*算法进行全局路径规划。A*算法核心原理为从起点向目标点发起搜索,通过估值函数评估状态空间内所有节点,选取移动代价最小的节点作为扩展节点并迭代搜索,直至抵达目标点,生成最优路径。

图3 DWA算法流程
2.实验场地和机器人构建
实验场地位于中国陕西温室番茄种植园,那里的番茄植株高度范围为30-160厘米,邻里间距约为80厘米。

图4 实验场地
设计了尺寸为80cm×60cm×45cm 的温室番茄采摘机器人,配备激光雷达、车架、外壳、轮式行走机构等,以搭载ROS系统的工业PC(IPC)为主控制器,结合多种传感器和驱动设备实现运动控制。
图5 温室番茄采摘机器人体系结构。1.激光雷达2.转向机构3.悬挂机构4.从动轮5.机架6.外壳7.驱动轮
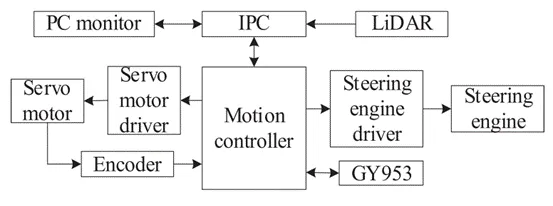
图6 温室番茄采摘机器人控制系统
3.模型建立
建立机器人运动学模型和里程计模型,通过激光雷达校正里程计的总误差,准确描述车轮旋转与机器人本体运动的关系。
机器人运动学公式如下:

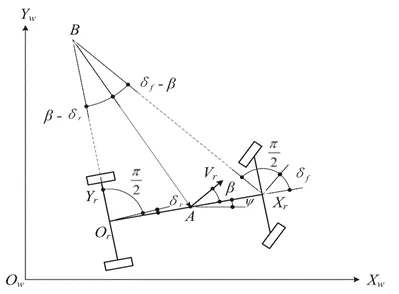
图7 机器人运动模型
里程计公式如下:

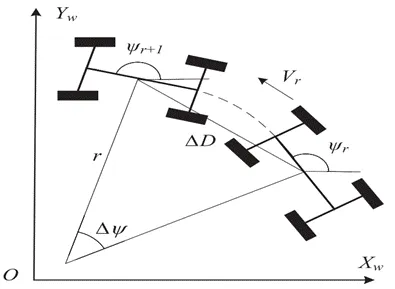
图8 里程计模型
4.程序编写:在ROS系统中配置相关功能包,编写巡航节点程序,PC与IPC在同一局域网内,通过PuTTY软件远程监控,实现机器人导航定位和路径巡航。
三、主要的研究结果
1.实验S型巡航
平均横向偏差0.48cm,最大偏差2cm;平均纵向偏差0.26cm,最大偏差 2cm,具备良好的室内专项路径巡航性能。
表1 实验室内特殊路径巡航的实验数据
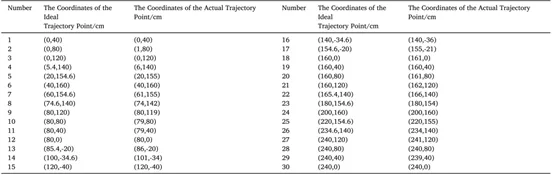
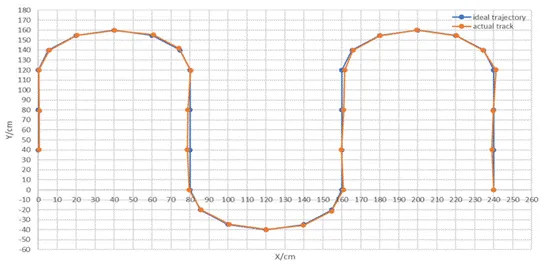
图9 实验室 S 型巡航轨迹
2.温室直线行走
X轴平均偏差3cm,最大偏差7cm;Y轴平均偏差0.73cm,最大偏差2cm,满足直线行走偏差要求。
表2 温室番茄种植区直线运动实验详情
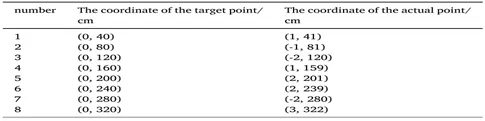
3.温室定点停车
X方向平均偏差1.75cm,最大偏差3cm;Y方向平均偏差0.875cm,最大偏差2cm,定位偏差在允许范围内。
表3 温室番茄种植区定点停车实验数据
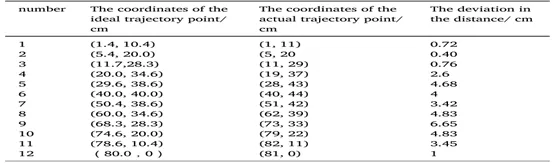
4.温室转弯
X方向平均偏差1.6cm,Y方向平均偏差2.27cm,最大距离偏差6.65cm,满足转弯行走偏差要求。
表4 温室番茄种植区转弯运动实验数据
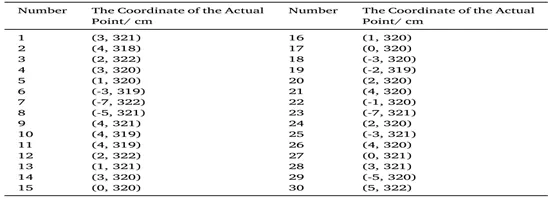
5.温室S型巡航
X轴平均偏差1.17cm,最大偏差3cm;Y轴平均偏差0.6cm,最大偏差2cm,虽因机器人质量和惯性存在轨迹偏差,但在允许范围内。
表5 温室番茄种植区特定路径巡航实验数据
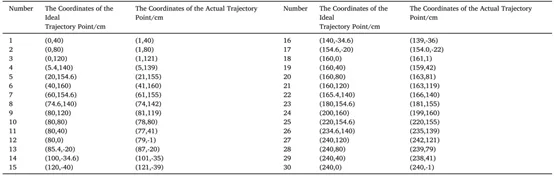
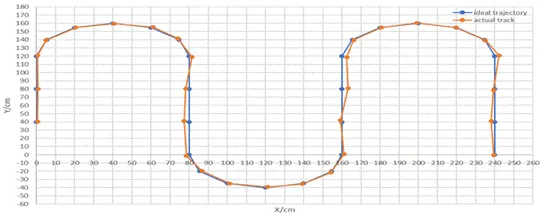
图10 温室S型巡航轨迹
四、结论
针对温室作物栽培场景下番茄采摘机器人高精度特定作业路径巡航的需求,本研究设计了一套基于激光SLAM的自主导航系统。该系统采用Gmapping算法与AMCL算法分别完成建图与定位任务,同时引入A*算法开展全局路径规划,并借助机器人操作系统(ROS)中的导航工具包,结合温室作物的垄作种植特点,实现机器人的特定路径导航控制。在温室番茄种植区开展的试验结果表明:机器人在320cm的直线行驶过程中,X轴平均偏差为3cm,Y轴平均偏差为0.73cm;在半径40cm的转弯工况下,X轴平均偏差为1.6cm,Y轴平均偏差为2.27cm;在执行“S”形路径巡航任务时,X轴平均偏差为1.17cm,Y轴平均偏差为0.6cm。试验验证结果证实,该导航定位系统可实现高精度特定作业路径巡航,能够满足温室番茄采摘作业的实际需求,同时也适用于喷药、施肥、物料转运等各类温室自动化作业场景。此外,该系统还具备成本低廉、操作简便、巡航路径灵活可调的优势。
综上,本研究对番茄采摘机器人导航定位技术的发展具有一定的推动作用,可为其他需要导航定位功能的机器人研发提供参考,具备较高的实际应用价值与广阔的发展前景。未来研究中,团队将尝试结合基于SLAM框架的RTAB-MAP算法与KinectV2深度相机,构建环境的三维稠密点云模型与二维栅格地图,以此实现地势平整度较差场景下的高精度环境建模,进而达成该类场景中的精准定位,进一步满足温室实际作业对导航偏差控制的严格要求。
文献来源
Liu, Kenan, et al. "Autonomous navigation system for greenhouse tomato picking robots based on laser SLAM." Alexandria engineering journal 100 (2024): 208-219.
转自绿水智慧农业
监制:王丽娇



 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
