随着全球农业现代化进程加速,农业机器人已成为提升生产效率并保证粮食安全的关键技术之一。农业多场景复杂多样的特殊性,使农业机器人研发面临诸多难题:试验周期长、投入费用高、场景数据少等。在此背景下,虚拟仿真技术为冲破这些瓶颈提供了重要解决途径。
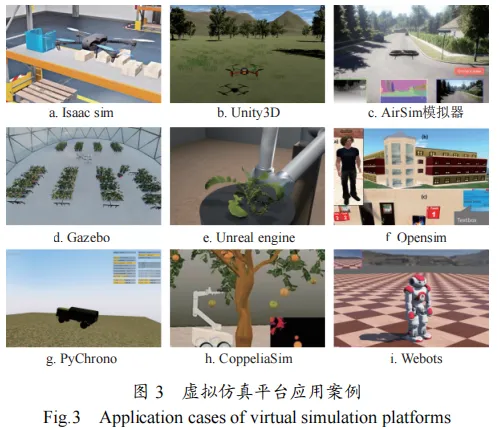
该文系统梳理了虚拟仿真技术的发展脉络,进而综述其在机器人尤其是农业机器人研究与开发中的应用进展。在此基础上, 聚焦结构设计与性能验证、感知与控制算法训练、作业流程仿真测试等关键环节,归纳并剖析虚拟仿真支撑农业机器人研发的典型应用案例与技术路径。最后,围绕虚拟仿真在农业机器人技术转化过程中仍需突破的瓶颈问题展开讨论,包括仿真与真实之间的差异( sim-to-real gap)、高度动态农业作业场景的建模难题,以及机器人-作物-土壤等复杂物理交互过程的精确表征,并据此总结可行的改进思路与发展趋势。
展望未来,高保真、多尺度、多模态仿真有望与人工智能、数字孪生及农业机器人技术深度融合,构建贯通“模型构建-算法训练-虚实验证-在线迭代” 的研发闭环,进一步提升农业机器人研发效率与可靠性。该文分析可为虚拟仿真技术在智慧农业与农业机器人领域的深化应用与创新发展提供参考。