2026年第6期论文已上线,点击关注不迷路!
《农业工程学报》2026年第42卷第1期刊载了河北农业大学等单位赵建国、安美林、赵学观、王雅雅、马志凯、李媛普、王博奥与郝建军的论文——“基于WEED-YOLOv10的玉米杂草检测方法与对靶喷药系统设计”。该研究由国家重点研发计划项目(项目号:2023YFD2301500)等资助。
引文信息:赵建国,安美林,赵学观,等. 基于WEED-YOLOv10的玉米杂草检测方法与对靶喷药系统设计[J]. 农业工程学报,2026,42(1):48-57.
DOI: 10.11975/j.issn.1002-6819.202506217
研究目的与方法:
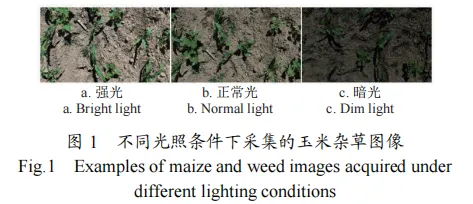
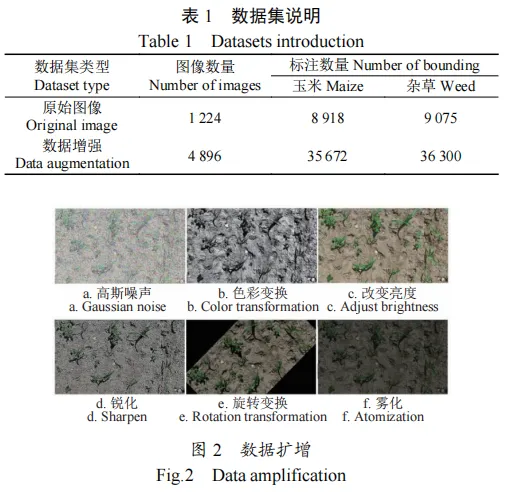
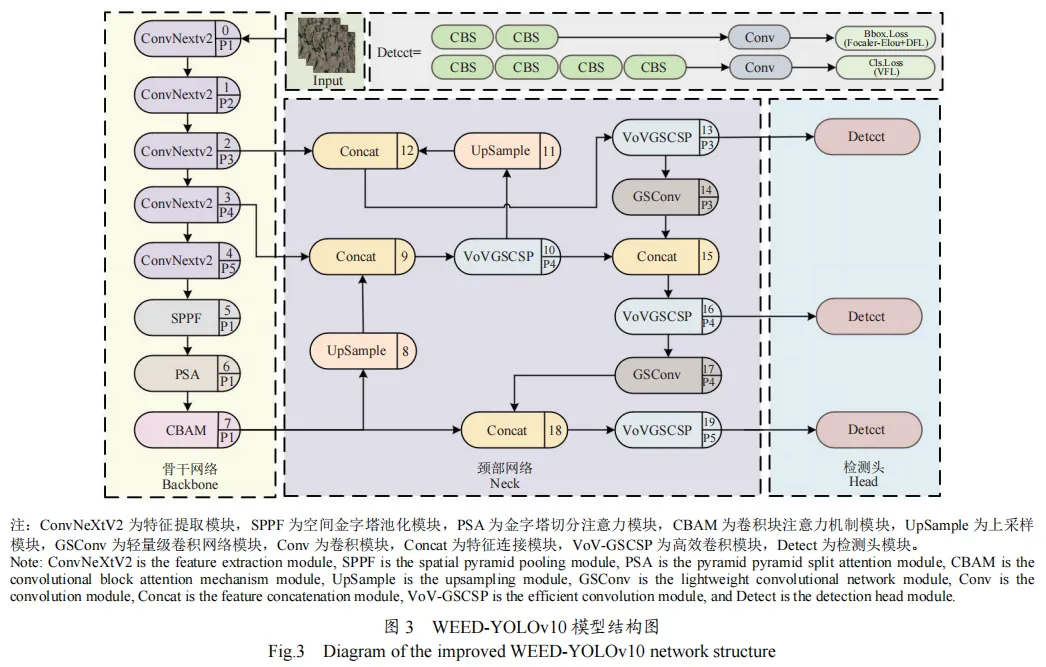
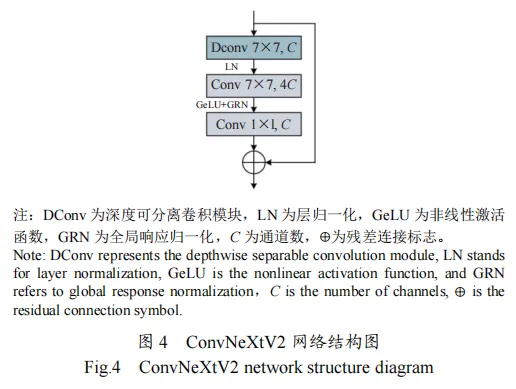
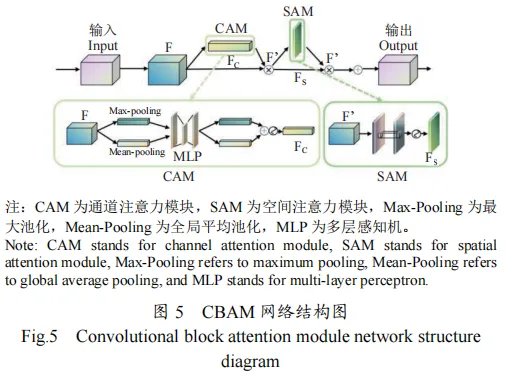
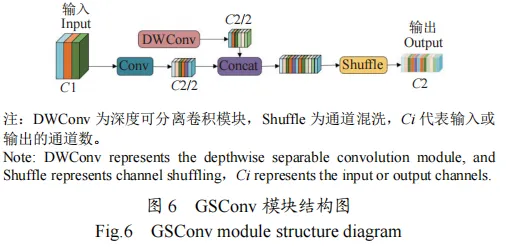
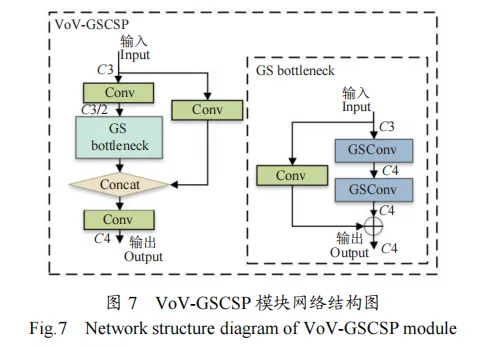
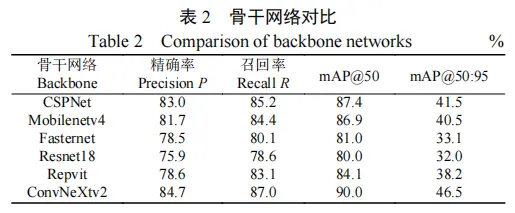
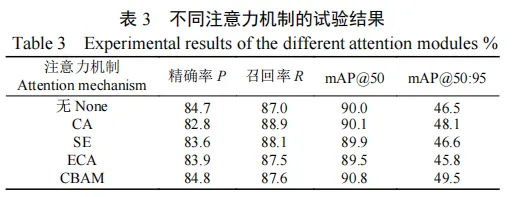
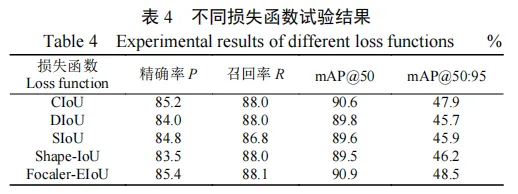
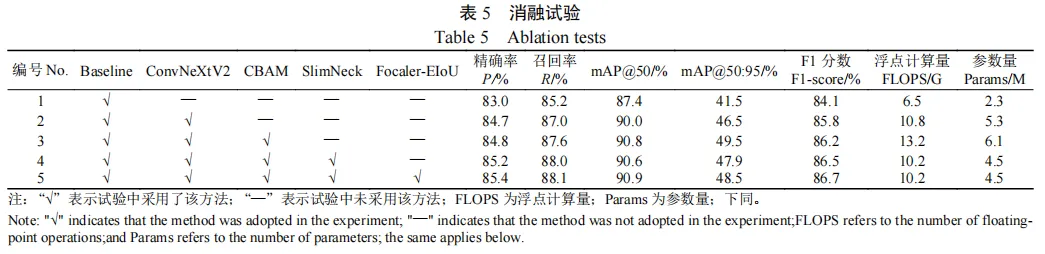
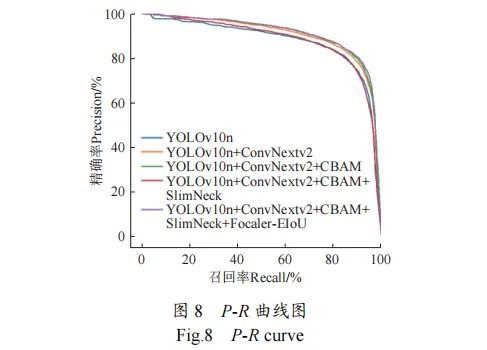
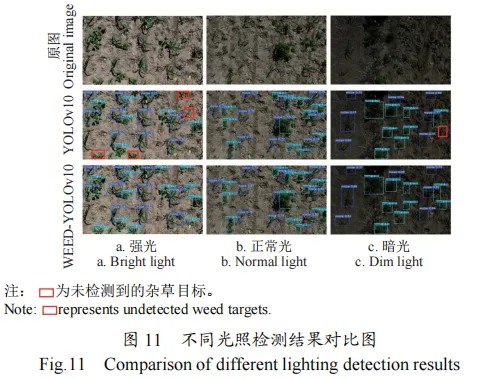
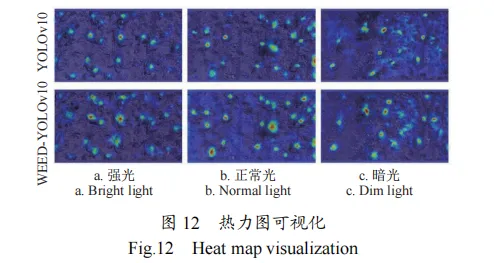
针对玉米杂草识别过程中因光照变化导致识别精确度低及漏检问题,该研究以幼苗期玉米及其伴生杂草为研究对象,设计一种基于WEED-YOLOv10的玉米杂草检测方法。首先,通过无人机快速采集田间高分辨率图像构建了玉米杂草数据集;其次,以YOLOv10n为基线网络,将骨干网络替换为ConvNeXtV2以增强特征提取能力;继而,为避免因模块拼接可能带来的信息冗余或丢失问题提升对光照干扰的鲁棒性,嵌入CBAM注意力机制;然后,引入SlimNeck结构优化网络计算效率,有效平衡了模型计算资源消耗与特征表征能力;最后,使用Focaler-EIoU损失函数进一步提高模型定位精度。
结果与结论:
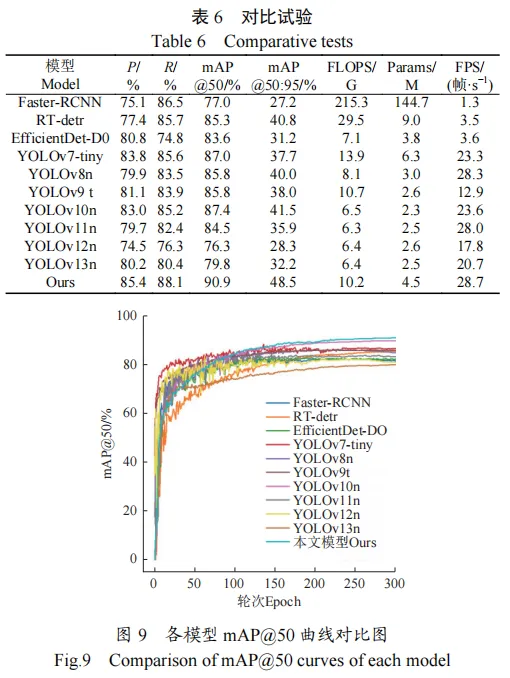
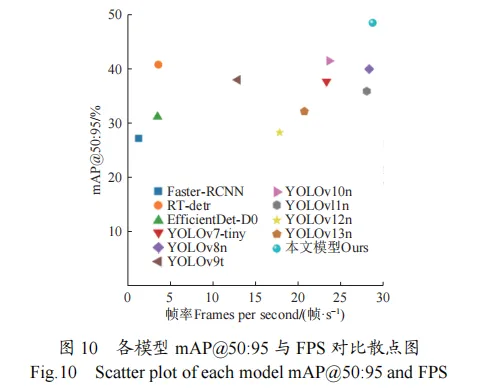
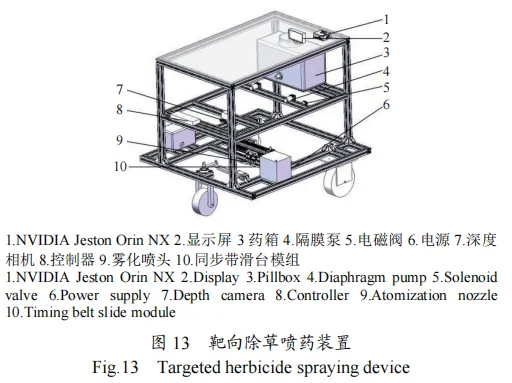
试验结果表明,WEED-YOLOv10在精确率、召回率、mAP@50、mAP@50:95和F1分数上分别达到85.4%、88.1%、90.9%、48.5%和86.7%,较基准模型分别提升了2.4、2.9、3.5、7.0、2.6个百分点,各项精度指标均优于其他对比模型,部署在NVIDIA Jetson orin NX上的图片推理速度达到28.7帧/s,实现了检测速度与精度的平衡。进一步地,基于WEED-YOLOv10开发对靶喷药系统,该系统实时捕捉并解析来自模型的识别信号,实现对除草喷施装置的精准调控。
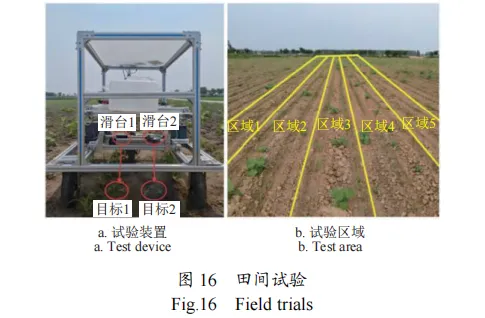
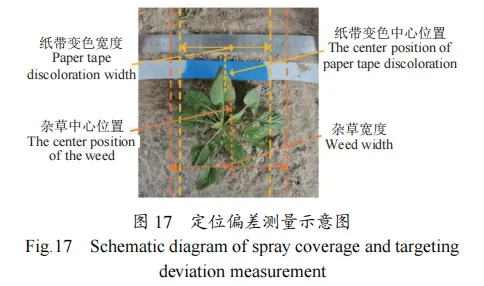
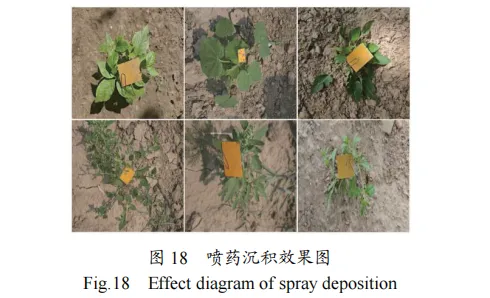
田间试验结果显示,对靶喷药系统施药准确率为93.7%,喷洒覆盖率为90.5%,对靶偏差为1.45cm,杂草实时检测速度为20.1帧/s,实现了自动化的玉米田间除草作业。该研究为复杂光照场景下农田杂草治理提供了可靠的技术方案,对推动农业智能化作业具有重要意义。
本文由丨《农业工程学报》编辑部丨精编发布
欢迎留言、分享、点赞
转载、投稿、咨询
邮箱:tcsae@tcsae.org
发布征集
欢迎广大作者、读者投稿至我刊公众号,包括但不限于创新科研成果、科技写作技巧、书籍推介、优秀科技工作者介绍、科研团队招聘/招生、行业资讯以及相关活动等农业工程领域信息。
公众号文章投稿邮箱:abe-newmedia@tcsae.org
转载请注明来源、原标题与原文链接:本文转自“农业工程学报(ID:tcsae1985)”微信公众号,原标题:xxxxxx;原文链接:xxxxxxxx。
公众号内回复【关键词】查询/获取更多信息
公众号内回复【2026年征稿】获取本刊2026年度重点专题、优选专题征稿启事
公众号内回复【2025学术年会】回放中国农业工程学会第十届学术年会(CSAE 2025)
公众号内回复【2025审稿人】查看2025年度杰出、优秀审稿人评选结果
收看更多会议讲座回放欢迎关注“农业工程学报视频号”
点击下方“阅读原文”免费获取全文