农业机器人在“采摘”领域的三条技术主线
- 2026-05-30 20:15:45
研究中心致力于将清华团队成熟的智能机器人技术与大数据平台应用于农业领域;核心业务聚焦于
智慧农业机器人及成套装备的自主研发与系统集成;
提供覆盖“感知-决策-执行”全链的智慧农业综合解决方案;
致力于打造行业首台套重大技术装备,
通过产学研协同创新,助力完成技术申报与产业化落地,
成为中国农业智能化领域的核心技术引擎与装备供应商。

技术合作,请添加微信

@白懿慕
导语
News Today
采摘是农业机器人最难啃的“硬骨头”——今天我们把问题拆成三条主线:感知(看清果实)→ 末端器(怎样摘下来)→ 柔性握持(如何不伤果),用最新学术证据讲清每条线的进展、工程取舍与未来研究方向。
agr
清
iculture
农·业·新·技·术
01
为什么“采摘”特别难?
采摘机器人不是把手装上机械臂就可以的,它必须在复杂自然光照、多遮挡、可变果形与柔软组织的条件下,快速识别目标果实→判定最佳抓取点→执行低损伤的摘取动作,同时速度要接近人工、成本要可接受。这其中任何一环不过关,就会致使整个系统失效。学界因此把“采摘”当作集感知、力学、材料与控制于一体的跨学科挑战来攻克。

02
感知 —不只是“看见”,
而是把视觉变成可用决策信息
核心问题与目标感知不仅要定位果实,还要评估成熟度、姿态、遮挡与与植株的相对位置,并输出可供抓取/切割的操作点与置信度。关键衡量指标包括定位精度(像素/厘米)、成熟度分类准确率、实时帧率与在强光、背光、夜间等复杂光照下的鲁棒性。
当前主流技术与进展
多模态视觉融合 — RGB + 深度(结构光/ToF)+ 多光谱/近红外,用于同时解决目标检测与成熟度判定。最新综述指出,多模态融合能显著提高遮挡场景下的召回率与成熟判别性能。
深度学习的目标检测与实例分割 — 基于 YOLO、Mask R-CNN 及其轻量化变体在边缘设备部署,已经成为工程主流。但学界同时提示:数据集与标注偏倚(品种、光照)仍然限制模型泛化。
主动感知与视角规划 — “看一帧不够,机器要像人一样移动视角” 的研究(active perception)表明,通过机体/相机的小幅运动来获得更多角度可以显著减少遮挡误检。Magalhães 等系统性评述推荐把主动采视作为机器人字段研究的重要方向。
工程取舍与实务提示
在果园/大棚的工程化应用中,实时性与能耗是第一约束:边缘设备(Jetson/Orin)+轻量化检测模型的组合是现实选择,但需要以场景特定数据做“蒸馏训练”。
建议把感知验证写成量化验收项:不同光照/遮挡等级下的召回率与误报率、从探测到最终抓取点的端到端延迟(ms)应纳入合同/示范 KPI。
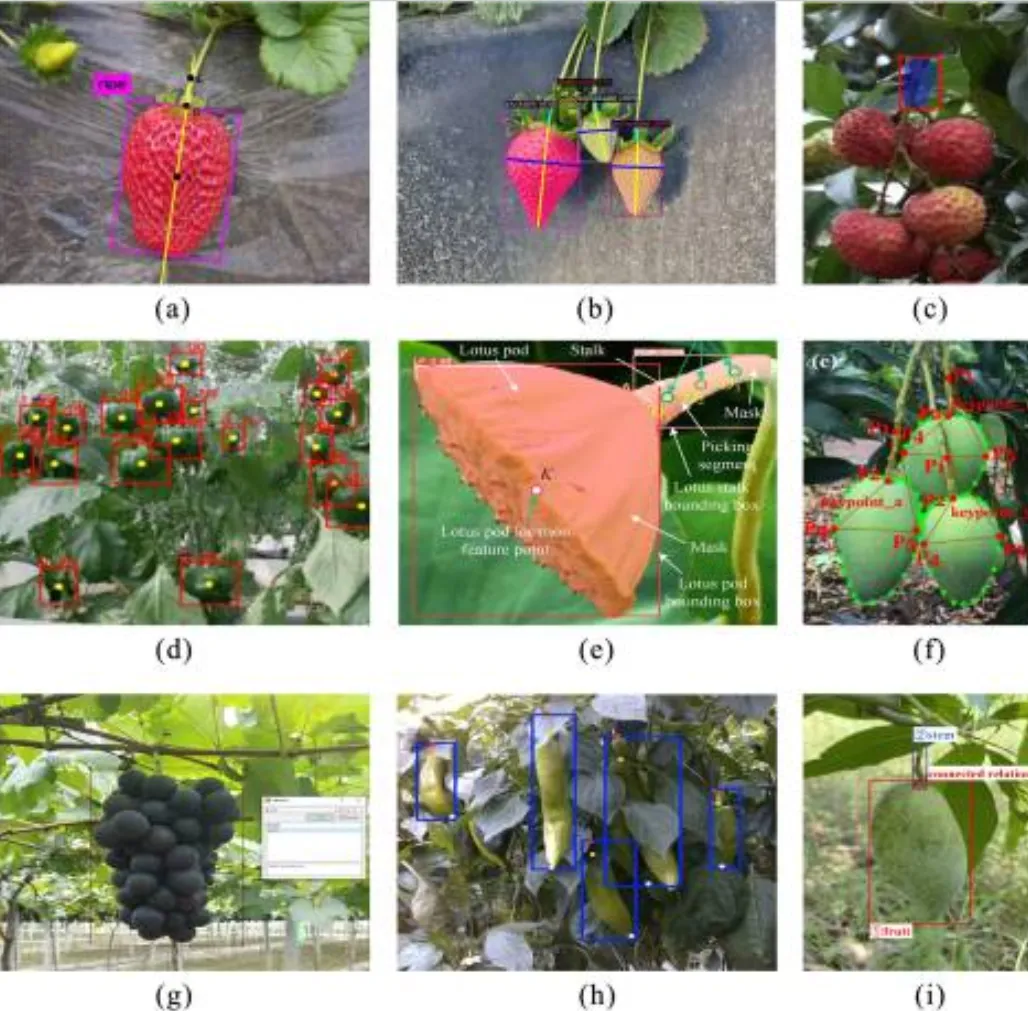
图为一种不同水果采摘点的贴标方法。(a)草莓采摘点计算、(b)草莓采摘点计算、(c)荔枝采摘点计算、(d)甜椒采摘点、(e)荚蒾采摘点计算、(f)芒果采摘点计算、(g)葡萄采摘点计算、(h)辣椒采摘点计算、(i)芒果采摘点计算;来源PubMed Central 《面向智能水果采摘机器人的视觉感知技术综述》
03
末端器—
摘取机制的多样化与工程边界
为什么末端器重要?末端是把“看到的果”变成“手里的果”的关键:不同作物的连接组织(果柄、蒂/梗)决定了摘取方式——有的需要剪切/切割(比如带柄水果),有的可用旋转/拉拔(比如番茄/草莓的某些品种),有的则可用吸附+脱落方式。末端设计必须在摘取成功率、损伤率与速度间找到工程折中。
主要设计流派与最新成果
机械式切割/旋转式末端 — 设计用于剪断果柄或旋转摘取,适合硬柄或有明显蒂部的果实;优点是摘取动作单一、可靠性高;缺点是对对准精度要求高。Li 等(2023)提出的“翻转—切割”式末端在球形果上的通用性验证显示出良好适配性。
吸盘/真空式 — 通过真空吸附果体并借助机械臂运动分离,常用于光滑表面水果(如苹果、梨);优点是抓取动作柔和,缺点是对果表形状与表面湿度敏感(真空密封不佳会导致失手)。
混合型与可变机制 — 最新研究趋向模块化、混合动作(先吸附再夹持或夹持后切割),以提高通用性与减少单一方式的盲区(参见 2024–2025 年的一批论文与 arXiv 报道)。例如 2024–2025 年出现的“吸盘+机械指”组合以及伸缩式夹指,旨在先脱离障碍再安全取果。
工程考量(如何选型)
作物为王:选型首要依据是目标作物的果柄类型、果体尺寸与行距。工程化建议先在小规模样板地做 AB 对比(人工 vs 机器人)并以“损伤率、吞吐量、作业每果时间”建立基准。
模块化优先:为应对多样作物,工业实践倾向模块化末端,能在场边快速更换不同抓取工具以提高设备利用率与商业可行性。
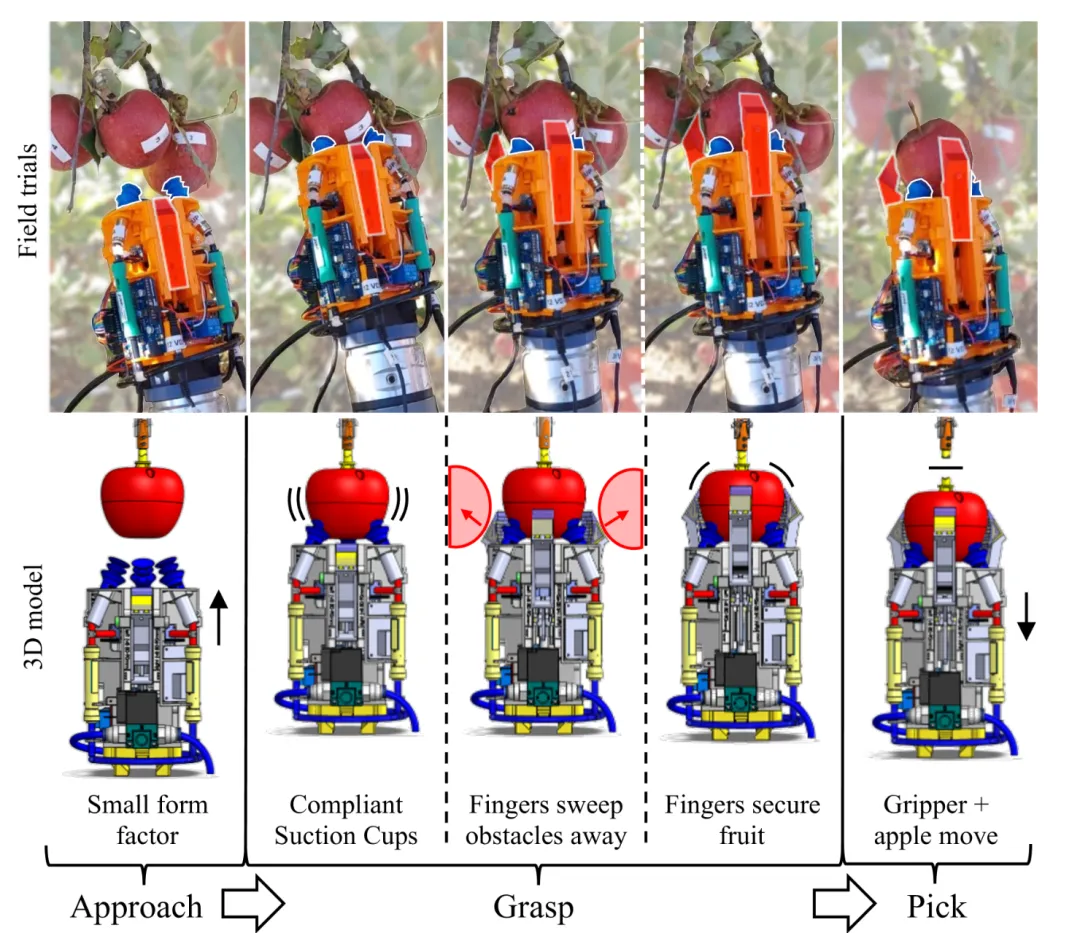
图片来源康奈尔大学《紧凑型机器人夹持器,带串联驱动,用于选择性水果收获》;从左到右。方法:夹持器以小尺寸接近水果,以减少碰撞。抓握:最初用吸盘顺从抓握,然后用凸轮驱动的手指抓握,夹在相邻的水果之间。采摘:在采摘过程中,苹果被固定在夹持器中。
04
柔性握持—
材料学与可变刚度的工程学问题
核心问题果体是“脆弱的”:过大压强造成挫伤、表皮破损;过小握力则抓不牢。软体夹持器提供了通过材料形变实现“拥抱式”抓取的思路,但其工程化需要解决可控性、重复定位精度与耐久性。
材料与制造工艺的进步 — 软体夹持器多采用硅胶、热塑弹性体(TPE)或 3D 可打印软材料,最近的研究(Frontiers, 2024)展示了用 TPE 打印的软爪在小果(草莓、番茄)上的低损伤率与良好重复性。
可变刚度与内嵌传感 — 为了在“柔软”与“可控”之间取得平衡,研究者在软体爪中嵌入可变刚度结构(气动腔、粒子流填充或电致变形机制)与触觉传感器,用于在线调节握力与检测接触状态。
多模态末端(suction + soft fingers) — 工程实践显示单一抓取模式难以覆盖全部场景,混合吸附+柔性指的架构能在抓取前完成初始固定,随后机械动作完成最后分离,兼顾速度与低损伤。
工程挑战与建议
耐久性与可维护性:软体材料在田间易磨损、被泥土/农药污染,需设计快速替换模块与耐污材料。
控制策略:软体夹持器需要闭环力/触觉控制,单靠开/关动作不够;工程上常用低延时触觉反馈与自适应握力策略以降低损伤率。
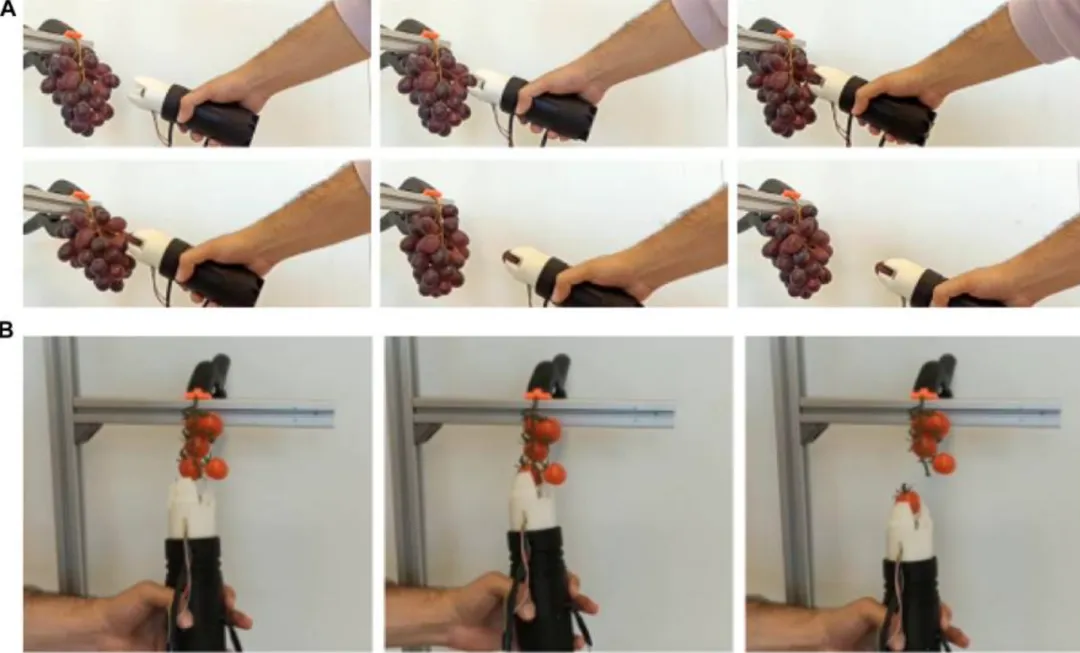
图片为采用热塑弹性体(TPE)适合小型水果的软夹持器与评估设计的夹持器,用作采摘(A)葡萄和(B)樱桃番茄等簇状水果的软工具。图片来源PubMed Central 《软夹持器,用于小水果收获和拾取和放置作》

05
把三条线整合:
系统集成、试验指标与实际验收
单点技术进步不等于系统可用,必须把感知—决策—末端—控制—运维做成闭环,因此要尤为关注如下5点:
单果作业时间(s/个)与吞吐量(果/小时)
损伤率(%,按统一标准测量:表皮破损、碰伤深度)
抓取成功率/第一遍成功率(%)
端到端延迟(从检测到动作完成,ms)
系统可靠度(MTBF;维护频率)与每亩地的 运营成本(含人力、维护、电能)
另外就是未来几点,重点的关注方向着重在
大规模、多品种的开放数据集(含多光照与遮挡标注);感知算法的“场景泛化”是首要瓶颈。
模块化、易更换的末端生态:在商业化扩散中,末端的通用性与更换效率决定设备利用率。
软体夹爪的寿命与可维护性研究:力学老化、污染影响与快速替换的工程解决方案
主动感知 + 任务级调度:让机器人像“人”一样通过小幅位移优化视角,再结合并行化作业提升吞吐。
采摘机器人不是某一门孤立技术的胜利,而是感知的鲁棒性 + 末端的机械智慧 + 柔性材料的工程化三条线走齐时,才能真正把“会摘”变成“稳定可用”。研究者应更多把论文的评价尺度统一为端到端指标,工程团队在示范时要严格数据化验收,产业才能从“样机秀”走向“规模化”。
清华装备研究院智能系统与大数据分析研究中心
我们深度聚焦"智能装备+大数据分析"的技术融合,在智慧农业领域已形成完整的解决方案:
在智能导航领域,我们开发的农业机器人导航控制系统,兼容北斗与GPS双模定位,精度达到厘米级,已应用于果蔬采收、农田巡检等多类移动平台。
在作业监控方面,我们自主研发的农机作业质量监测终端,可实时采集深松深度、播种数量、施肥用量等关键数据,并通过云平台进行作业质量分析与可视化展示。
在精准作业环节,我们推出的变量施肥与精准施药系统,能够根据多源遥感数据与机载传感器信息,实时调整作业参数,真正实现"一处一策"的精细化管理。
这些装备已在多个农业示范园区投入应用,显著提升了农业生产效率与资源利用率。
如果您正在规划智慧农业项目,面临农机智能化升级的技术挑战,欢迎与我们联系。 我们的技术团队将为您提供:
智慧农业全流程技术咨询
智能农机装备定制化研发
农业大数据平台建设
现有产线智能化改造方案
清研智慧农业
○
○

陈 灏
智慧农业项目负责人
清华装备院智能系统与大数据分析中心主管

特别说明

本文部分内容(包括但不限于文字、图片、数据等)来源于互联网公开信息,旨在传递更多资讯,仅供学习交流之用。其版权均归原作者或原始出处所有。
为支持原创,本公众号会尽量标注来源。如您发现本公众号中有内容侵犯了您的合法权益,请立即通过后台留言或添加客服微信等方式与我们联系,我们将在核实后第一时间进行处理。
未经本公众号明确授权,任何个人或组织不得将本文内容用于商业性转载或摘编。转载请联系后台开白;凡从本公众号转载本文至其他平台所引发的一切纠纷、后果及法律责任,均由转载方自行承担,本平台概不负责。

随机文章
-
 10个月宝宝每天需要喝多少奶粉?
10个月宝宝每天需要喝多少奶粉?
- 实皆省农业:实皆省实皆县区现财年种植的冬蔬菜作物已超过规划面积
- 农业农村部班子领导(截止2026年2月20日)
- 农业全产业链发展是实现乡村全面振兴的必要路径
- 内蒙古农业大学招聘150人
- 农业农村部国际交流服务中心|某金融机构|恒力石化|宏观策略研究岗|电科材料(萨摩亚,香港,大连等)
- 社会实践|聊城大学农业与生物学院“深入乡村一线共筑五兴蓝图”服务队开展“助银龄享智能 跨越数字鸿沟”寒假社会实践活动
- 社会实践|聊城大学农业与生物学院“文脉寻踪”服务队赴济南市开展“黄河文脉寻踪”寒假社会实践活动
- 四川农业大学2026年同等学力申硕招生启动!申请条件、流程及费用一览
- 农业银行-乐分易/消费e分期
- 耒阳:陈昌义到大义耒水渔业基地 现场督导项目提速增效
